

서 론
연구지역
3차원 영상 분석법
카메라 검정
지상기준점 설치 및 좌표 측정
회전익 무인항공기 항공사진 촬영
포토스캔을 이용한 3차원 모델링
노천석회석광산 채굴량 분석
3차원 영상 분석 결과
1차 영상 분석
2차 영상 분석
3차 영상 분석
결 론
서 론
최근 운영비용이 저렴하고 광범위한 지역의 데이터를 신속하게 취득할 수 있는 무인항공기(unmanned aerial vehicle, UAV)인 드론(drone)을 활용한 연구가 활발하게 진행되고 있다. 무인항공기는 기체 형태에 따라 고정익과 회전익으로 분류할 수 있다. 고정익 무인항공기는 공기의 양력으로 비행을 하여 에너지 효율이 높으며, 장시간 비행이 가능하여 넓은 지역을 한 번에 촬영할 수 있다. 반면, 회전익 무인항고기는 상대적으로 에너지 효율이 낮아 비행시간이 짧은 단점이 있지만, 수직이착륙이 가능하다(Lee and Choi, 2015a). 무인항공기가 1910년대에 고안된 이후 주로 군사적 목적으로 이용되다 현재는 전 세계적으로 홍수나 화재와 같은 재난, 해양이나 산악지역 수색, 각종 모니터링, 통신, 영상, 지형공간정보, 디자인, 지질조사 및 지질도 작성, 자연재해 감시 등 다양한 분야에 적용되고 있다(Gross et al., 2005; Jung et al., 2010; Rau et al., 2011; Wich and Koh, 2012; Jordan, 2015). 또한 자원의 탐사와 개발 분야에도 점차적으로 그 응용 범위가 확대되고 있다(Cryderman et al., 2014; Lee and Choi, 2015a, 2015b; Cho et al., 2015).
Jung et al.(2010)은 무인항공기 촬영 영상을 통하여 변화가 빈번한 도시지역의 3차원 정보 취득 기법를 제시하고 처리공정을 개발하였으며, 그 결과로부터 3차원 가상도시 구축, 3차원 GIS 데이터베이스 갱신, 지형 및 지물 변화정보 추출 및 수치지도 수시생신에 활용할 수 있음을 제시하였다. Kim et al.(2010)는 풍수해와 같은 자연재해 현상을 모니터링하기 위해 무인항공기 적용성을 분석한 결과, 하천범람과 구조물 유실 및 붕괴, 사면의 유실 및 붕괴, 낙석과 하천 및 저수지 통수능 저하, 농경지 침수 및 퇴적 피해조사, 해안의 침수 및 침식, 시설물 및 구조물 파손 등의 분석이 가능한 것으로 보고하였다. Remondino et al.(2011)은 무인항공기를 이용함으로써 구조물 맵핑과 3차원 모델링이 가능함을 제시하였다. Jang et al.(2011)은 무인항공기 사진 촬영을 이용하여 해안에 산재한 해안표착물을 탐지하는 새로운 방법을 제시하였다. Rau et al.(2011)은 소형 무인항공기에 의한 항공측량 결과를 산사태 등의 지질재해 모니터링에 활용한 결과를 보고하였다. Wich and Koh(2012)는 여러 국가의 환경분야인 동물군 조사에 고정형 무인항공기를 적용한 결과 동물들의 밀도와 이동경로에 관한 정보를 파악할 수 있음을 제시하였다. Kim et al.(2014)는 무인항공기의 재해지역 분석이나 지도제작 등 국토모니터링분야로의 적용 가능성에 대한 연구를 실시한 결과 무인항공기의 효과적 활용 가능성을 확인하였다. Park(2014)는 무인항공기를 이용하여 저수지 방재 모니터링을 실시한 결과, 강우에 따른 수위 상승과 수면 면적의 증가를 효과적으로 관측할 수 있음을 확인하였으며, 저수지의 방재관리 모니터링 업무뿐만 아니라 긴급을 요하는 방재 업무에 최적임을 제시하였다. Jordan(2015)은 초소형 무인항공기의 지질학분야로의 적용 가능성을 제시하였으며, 지질 및 지질구조 조사, 지질도 작성, 시료채취, 화산활동 모니터링 등에 활용될 수 있음을 보고하였다. Rhee et al.(2015)는 태풍이나 홍수와 같은 자연재해 발생 시 영상을 기반으로 댐, 보, 교량과 같은 수변구조물의 피해정보를 정량적으로 할 수 있는 방법으로 무인항공기 촬영 영상 활용 가능성을 제시하였다.
Cho et al.(2015)는 무인항공 사진 촬영을 통한 비금속 노천광산 정밀 수치지형모델 구축 연구에서 짧은 시간에 고정밀 항공측량 자료 확보가 가능함으로 노천광산의 주기적인 촬영을 통한 채광량과 사면붕괴 모니터링이 적은 비용과 시간으로 가능함을 확인하였다. 또한 Lee and Choi(2015a, 2015b)은 고정익과 회전익 무인항공기를 이용하여 노천광산의 지형측량을 분석한 결과 고정익 무인항공기는 대규모 노천광산 현장, 그리고 회전익 무인항공기는 소규모 노천광산에 효과적임을 보고하였다. Lee and Choi(2016)는 고정익과 회전익 무인항공기를 이용한 지반측량 결과 비교 논문을 발표하였는데, 회전익 무인항공기가 고정익 보다 항공사진 수는 더 많았으며, 촬영시간도 더 소요되는 것으로 나타났다. 하지만 정사영상을 모델링하는 항공사진 자료 처리에 소요되는 시간은 회전익이 고정익보다 더 짧게 걸리는 것으로 나타났다.
본 연구에서는 4차 산업혁명과 융합된 기술로서 회전익 무인항공기인 드론을 활용하여 노천석회석광산 채굴장에 대한 3차원 모델링과 화약발파 전후의 위치데이터 차이에 의한 채굴량 분석을 실시하였다. 본 연구의 목적을 위하여 첫째, 채굴장에 대한 무인항공기 영상 촬영을 총 3회 실시하였다. 둘째, 촬영하여 얻은 영상자료로부터 3차원 사면 모델을 형성한 후 그 결과를 비교 및 분석하였다. 셋째, 이상의 결과를 종합하여 무인항공기를 이용한 노천석회석광산 채굴장에 대한 3차원 모델링과 채굴량 분석 가능성을 평가하였다.
연구지역
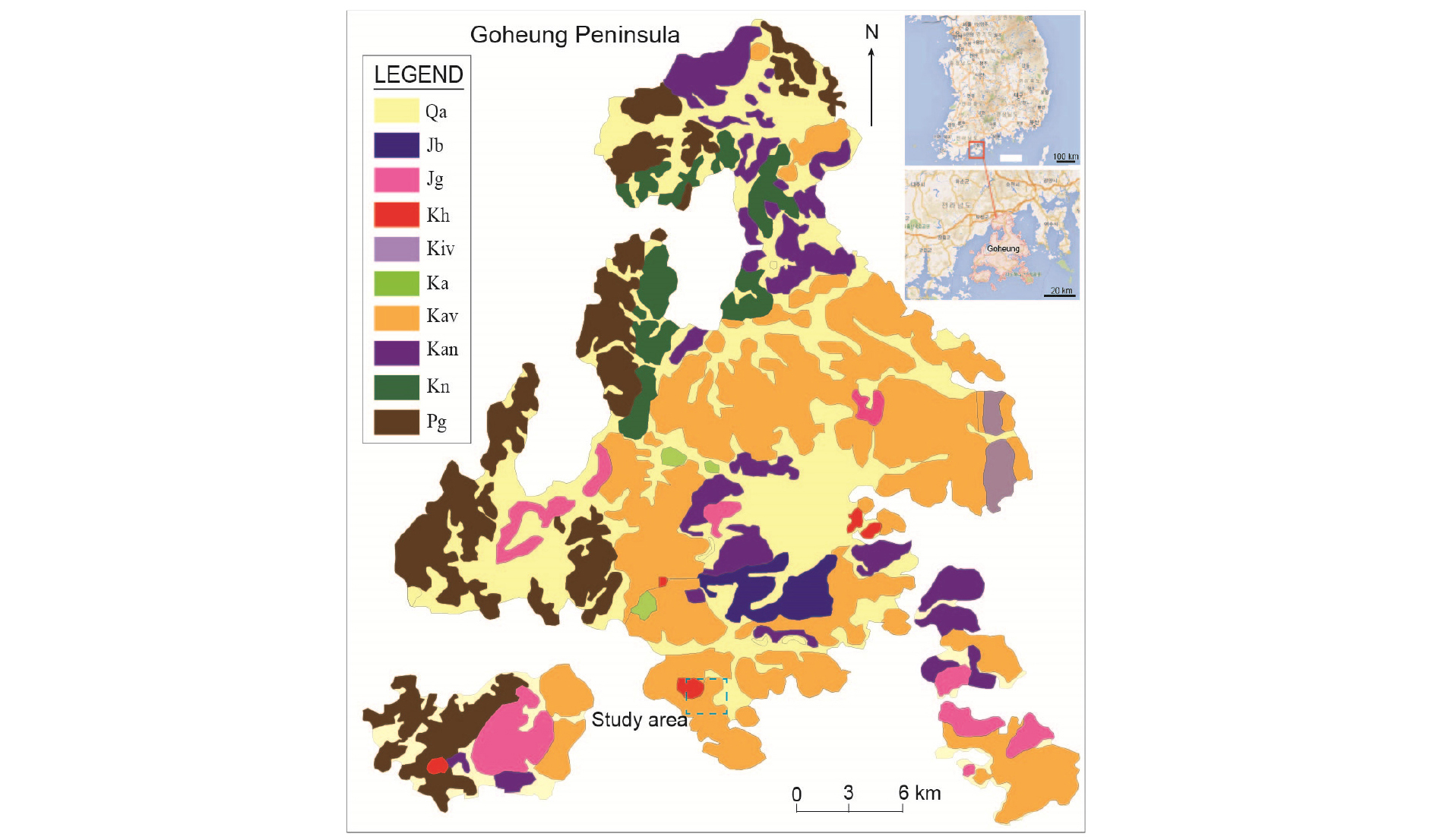
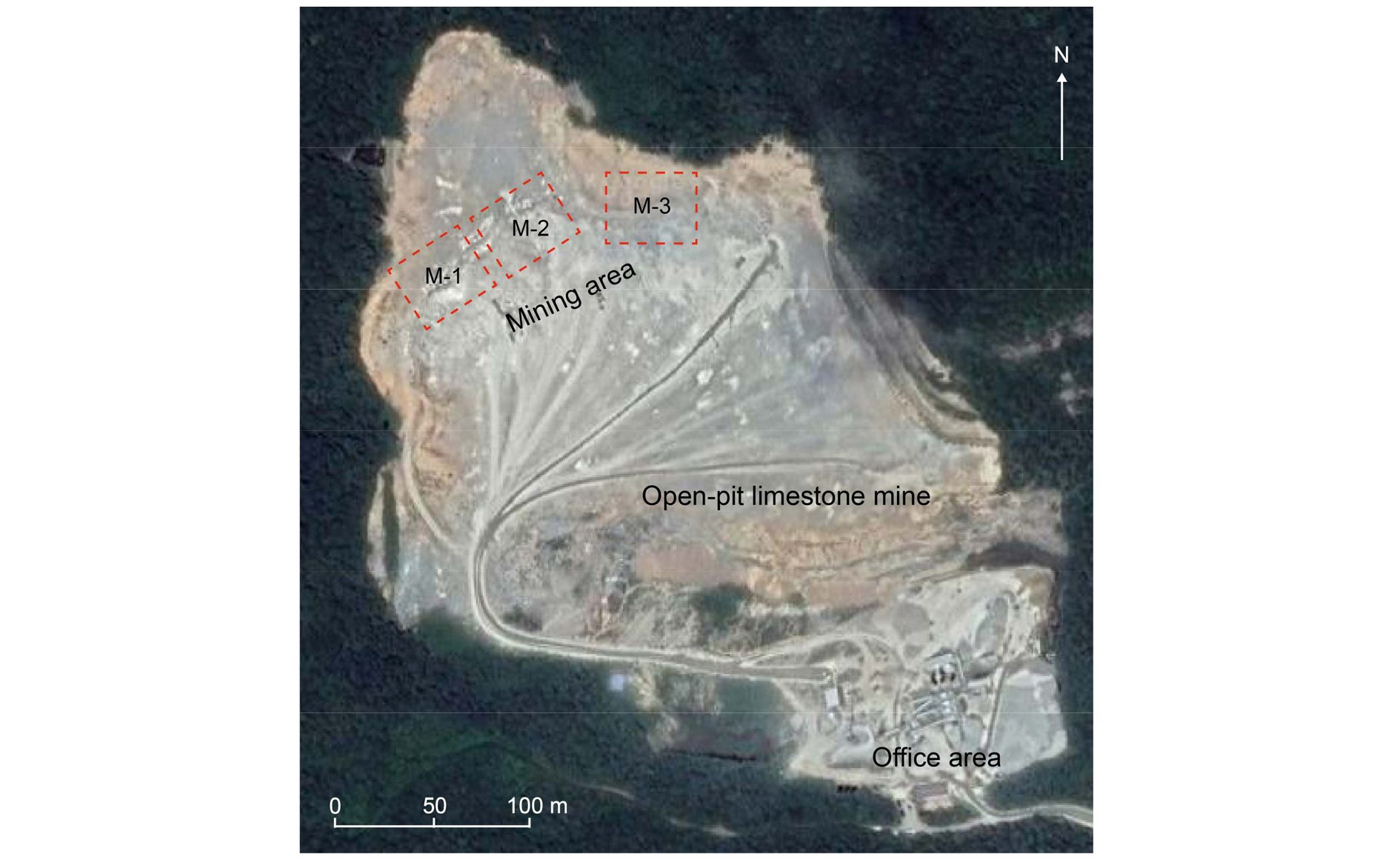
한반도 서남부에 위치한 고흥반도는 E127°05'24''-127°33'30'', N34°18'42''-34°49'30''에 위치해 있다. 지형적으로 볼 때 반도 남쪽으로는 폭이 넓어지는 형태로 서쪽의 보성만과 득량만, 동쪽의 순천만에 의해 둘러싸여 있는 전형적인 반도상의 지형을 이룬다. 고흥반도의 지형은 북부산지보다 남부내륙의 산지가 연속성이 있으며 해발고도도 더 높다. 산지의 주향방향은 고흥반도의 주향과 거의 일치한 NE-SW방향이 우세하다. 고흥반도의 지질은 대부분 중생대 백악기의 화성암류에 기인한 산성화성암인 유문암질 응회암이 넓게 분포한다. 그 주변을 중심으로 중생대 백악기의 화성활동과 관계가 있는 안산반암과 불국사화강암, 섬록암 등이 분포하고 있다. 고흥반도 서남부와 서부, 그리고 북서부에 해당되는 비봉산 지역은 선캠브리아기의 편마암류와 백악기의 퇴적암류가 분포하고, 국지적으로 안산암과 응회암도 분포한다. 적대봉과 마치산 지역은 안산암과 응회암, 안산반암, 흑운모화강암, 미문상화강암, 응회암질유문암이 분포한다(Fig. 1). 고흥지역의 선구조는 N70°E방향이 가장 우세하며, N60°E와 N80°E방향도 함께 나타나는 것으로 보고되고 있다(Ministry of construction and transportation, 2003). 연구지역은 고흥반도 남쪽의 고흥군 도화면 구암리에 위치한 노천석회석광산이다(Fig. 2). 본 광산의 개발은 하나 이상의 수평 벤치를 개설하여 굴착된 노천의 채광장에서 지표 근처의 광상을 채광하는 노천채굴 방식을 사용하고 있다.
3차원 영상 분석법
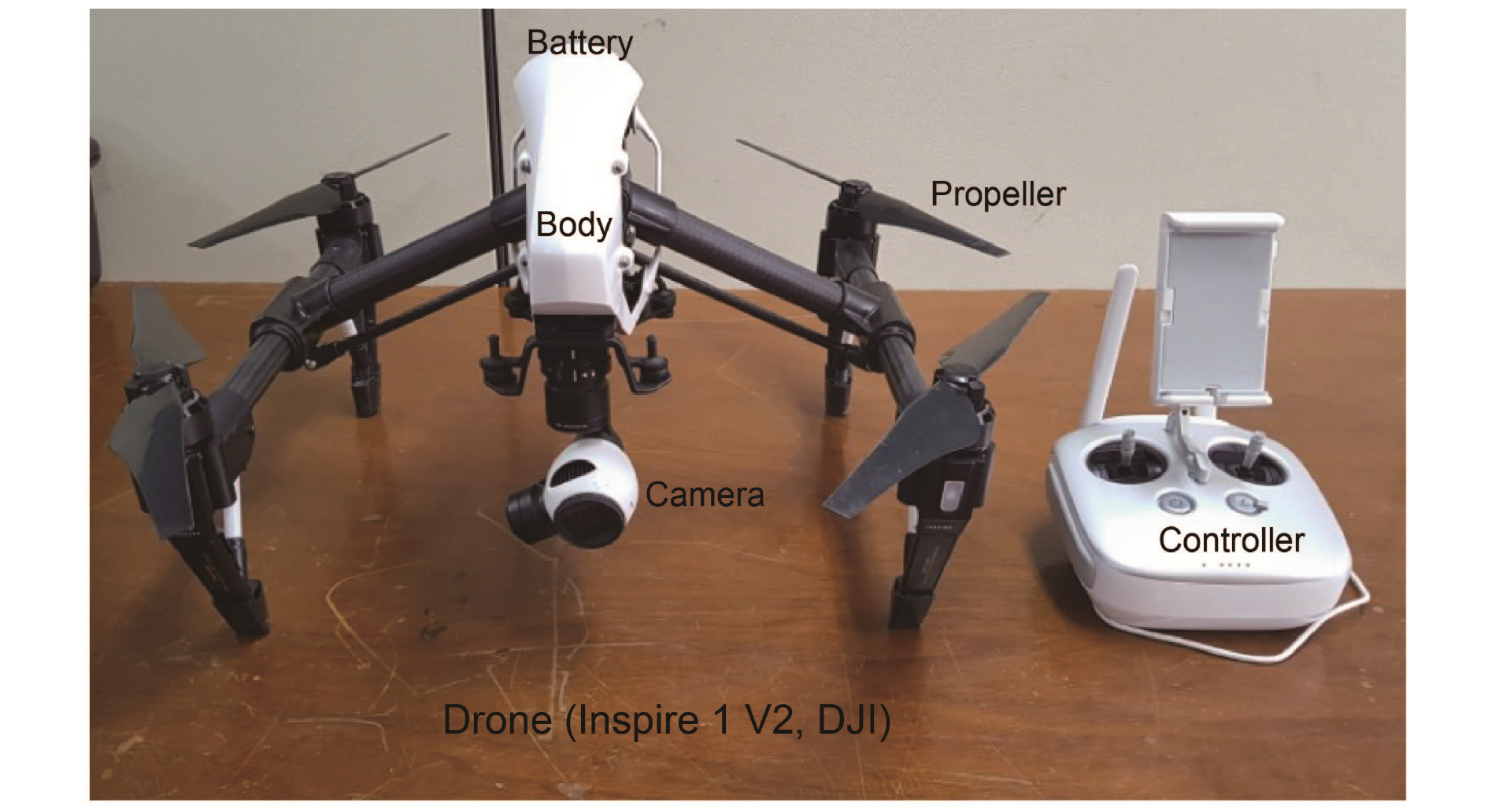
본 연구에서 사용된 회전익 무인항공기 영상은 DJI사의 Inspire 1 V2를 사용하여 촬영되었다(Fig. 3). 이 장비는 총 4개의 날개를 가진 쿼드콥터로 지능형 GLONASS와 GPS 시스템을 활용하여 기체의 위치와 더불어 안정적인 운행(Hovering)이 가능하며, 관성 측정장치(Inertial Measurement Unit; IMU)가 내장되어 있어 작은 기울기의 변화와 움직임에 반응하여 항상 일정한 자세를 유지할 수 있다. DJI Inspire 1 V2는 수동모드와 자동모드의 2가지 비행방법을 지원한다. 수동모드는 조종기를 이용하여 운전자가 직접 기체를 조종하고 자동모드는 특정 어플리케이션을 이용하여 비행경로 설정, 고도 설정, 비행 속도조절, 촬영범위, 사진 중복도 등이 가능한 다양한 기능을 갖고 있어 측량이나 계획된 비행에 적합하다. 무인항공기로 촬영된 영상은 상용프로그램인 Agisoft사의 PhotoScan을 이용하여 영상처리가 가능하다. 3차원 영상은 카메라 검정, 지상기준점 설치 및 좌표측정, 항공사진 촬영, 항공사진 모델링, 그리고 분석 등의 과정을 거친다. 3차원 영상 분석은 항공사진 촬영 순서에 따라 1차, 2차, 3차로 분류하였다.
카메라 검정
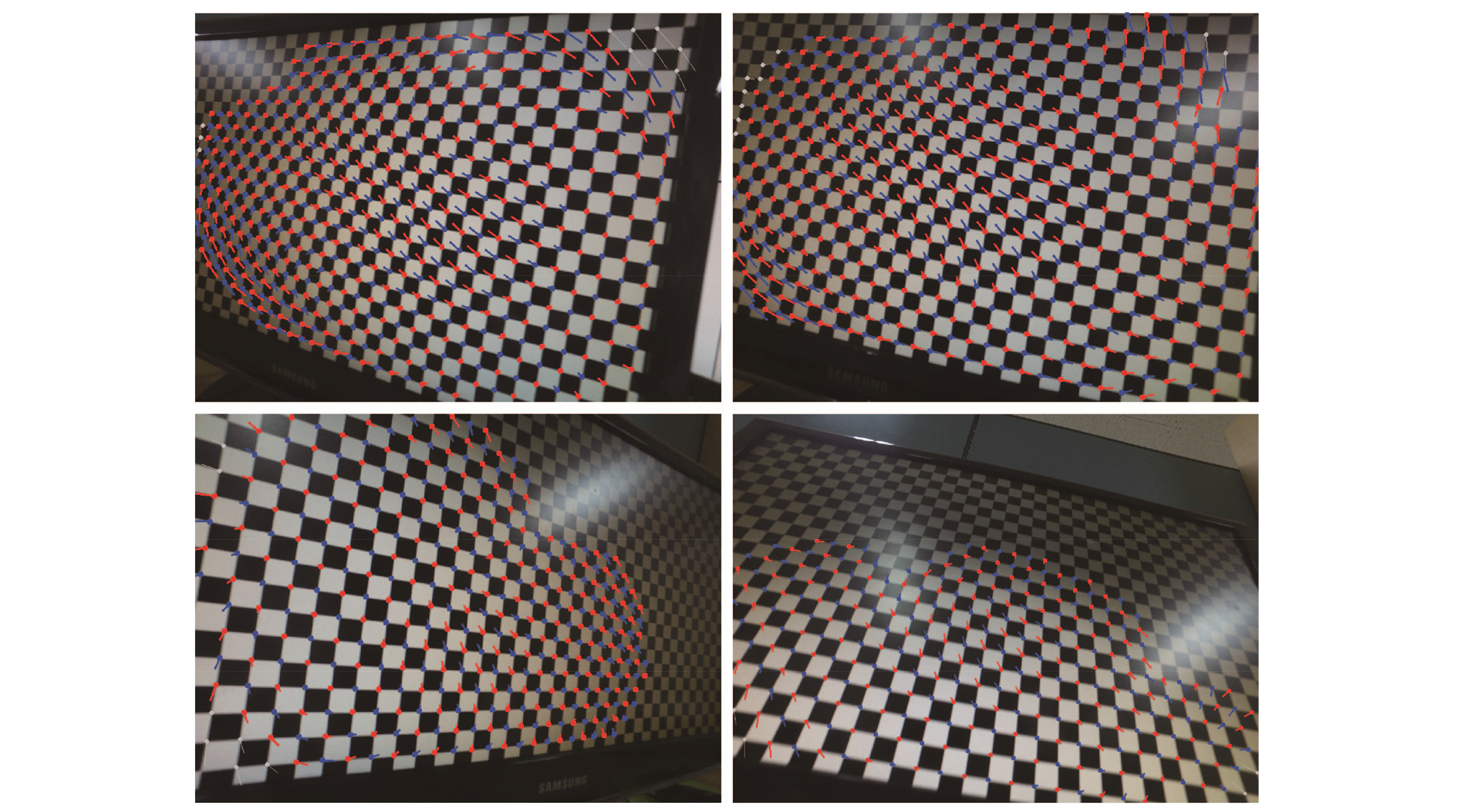
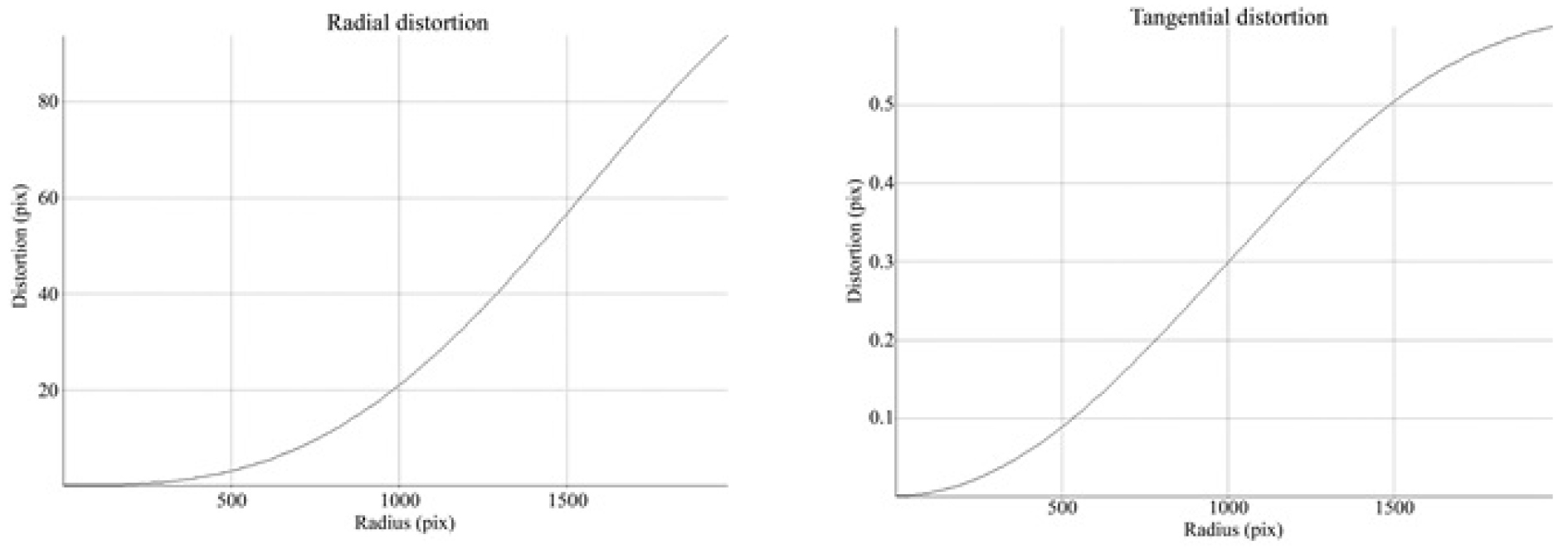
항공사진측량에서 항공측량 전용 카메라가 아닌 일반 카메라를 사용할 경우 카메라의 초점 거리나 렌즈 왜곡 정보가 제공되지 않거나 실제 값과 다른 경우가 많다. 따라서 무인항공기를 활용하여 사진(영상)을 촬영할 경우에는 카메라 렌즈의 왜곡량을 보정하기 위한 정확한 카메라 검증(camera calibration)을 실시해야 한다. 카메라 렌즈 왜곡에는 대표적으로 방사왜곡(radial distortion)과 접선왜곡(tangential distortion) 2가지로 구분할 수 있다. 방사왜곡은 렌즈 곡률의 왜곡으로서 렌즈의 연마 과정 등에서 발생한다. 접선왜곡은 렌즈를 조합할 때 렌즈의 중심이 정확히 맞지 않아 발생하며, 방사왜곡에 비해 무시할 수 있을 정도로 왜곡량이 매우 적다(이강원 외, 2016). 본 연구의 항공사진촬영을 위해 사용된 카메라는 중국 DJI사의 Zenmuse X3로 1200만 화소 해상도를 갖는다. Zenmuse X3 카메라와 짐벌의 특징을 정리하면 Tables 1과 2와 같다. 카메라 검정은 Agisoft Lens를 이용하여 실시하였으며(Fig. 4), 방사왜곡과 접선왜곡의 결과를 나타내면 Fig. 5와 같다.
Table 1. Characteristics of camera
| Model | Sensor | Lens | ISO range |
Electric shutter speed |
Image Maximum size |
Operating temperature range |
| FC350 |
Sony Exmor R CMOS | FOV 94°20 mm |
100~3200 (video) 100~1600(photo) | 8 s-1/8000 s | 4000×3000 | 0°~+40° |
Table 2. Characteristics of gimbal
| Model | Angular Vibration Range | Controller range | Maximum controllable speed |
| Zenmuse X3 | ± 0.03° | Pitch: -90°~+30° Pan: ±320° | Pitch: 120°/s Pan: 180°/s |
지상기준점 설치 및 좌표 측정
회전익 무인항공기를 이용한 사진을 촬영하기에 앞서 지상기준점(Ground Control Point, GCP)을 설치하고 그 좌표를 측정하여야 한다. 지상기준점은 회전익 무인항공기에 내재되어있는 GPS의 오차를 보정하기 위해 사진과 3차원 영상에서 식별가능한 대공표지판을 말한다. 지상기준점은 촬영된 사진들의 한 지점을 기준점으로 잡고 다른 사진에서 같은 지점을 찾아 정확도를 높여주는 점으로서 포토스캔(PhotoScan) 프로그램에서는 정확도를 높이기 위해 최소 3점 이상을 취하도록 권장하고 있다. 또한 지형의 기복이 심한 지점, 사진 중복도가 부족한 지점, GPS 정보의 정확도에 문제가 생길 수 있는 지점은 정확도에 문제가 발생할 수 있으므로 이러한 점을 고려하여 지상기준점을 설치해야 한다. 본 연구에서는 연구지역 지형과 현장의 작업환경을 고려하여 4곳을 선정하여 지상기준점을 설치하고 좌표를 측정하였다. 촬영은 3회에 걸쳐 수행되었으며, 매회 4곳의 지상기준점(총 12개 지상기준점)을 설치하였다(Fig. 6). 설치된 지상기준점은 항공사진촬영 시 식별이 가능한 크기여야 하며, 가로 50 cm × 세로 50 cm 크기로 제작된 대공표식지를 이용하였다. 좌표는 GARMIN사의 GPSmap 60csx 휴대용 위성항법장치를 이용하여 각 지점의 위도, 경도, 고도 좌표를 각각 측정하였다(Table 3).
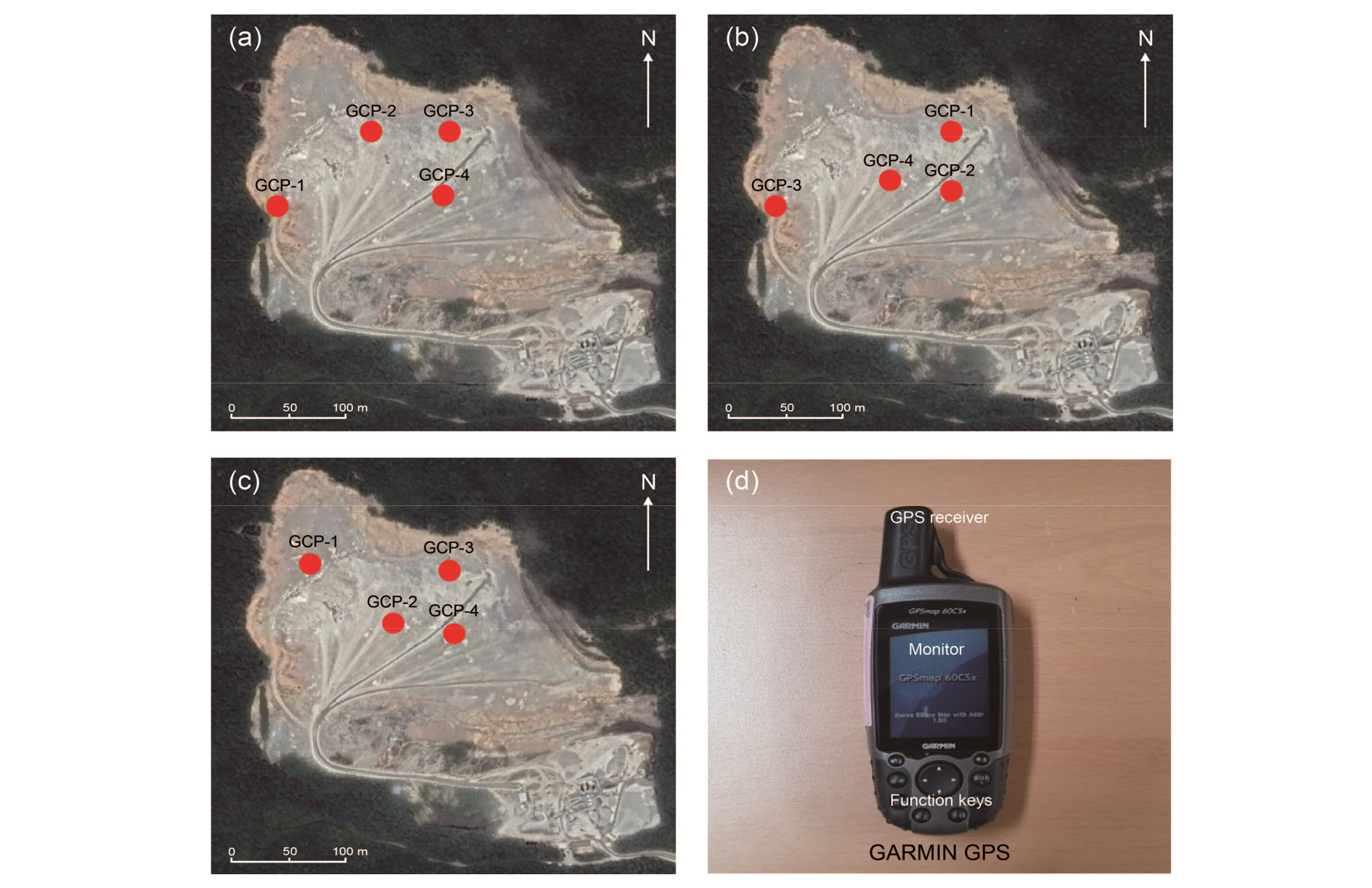
Table 3. Results of 3-dimensional image analysis of camera and ground control point (GCP) errors
회전익 무인항공기 항공사진 촬영
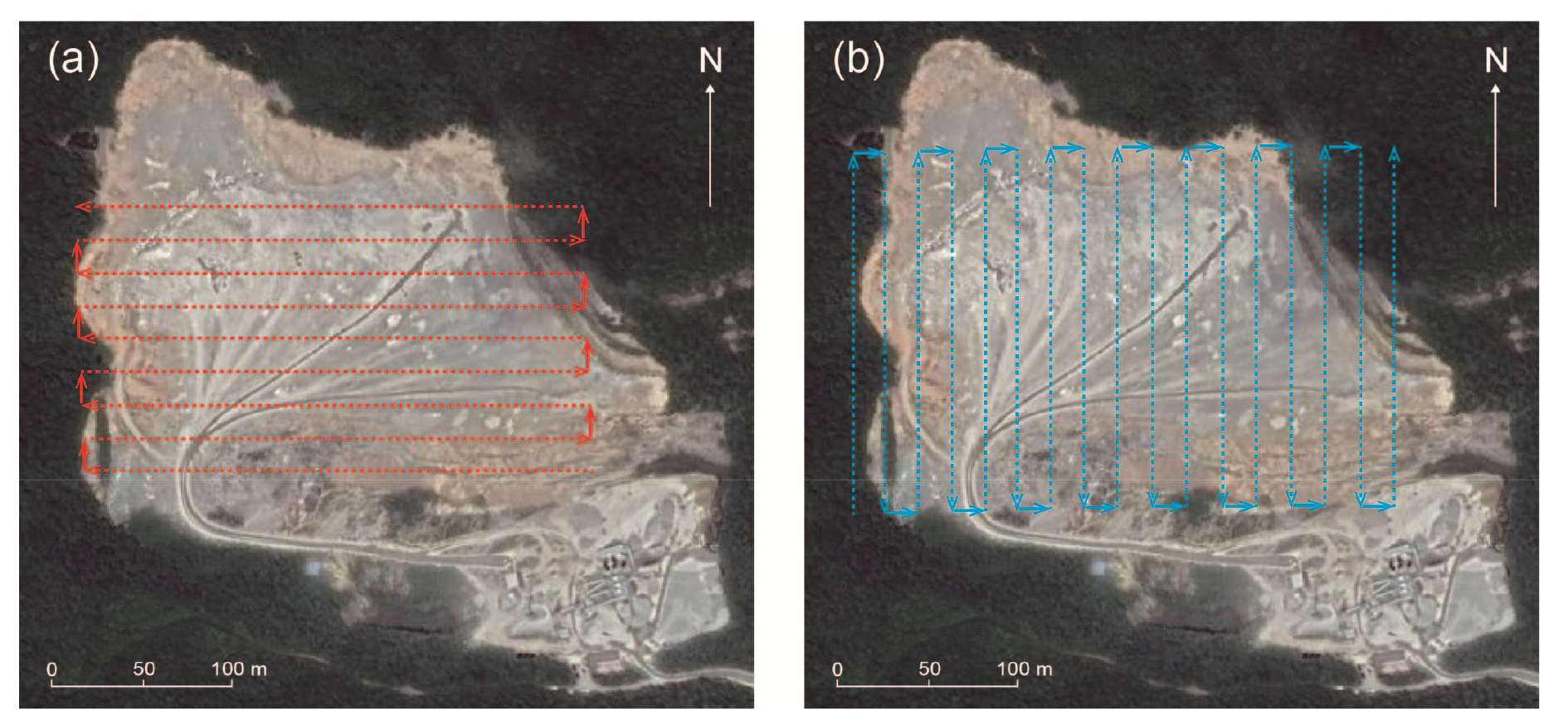
항공사진 촬영에 앞서 연구지역에 대한 최적의 항공사진을 얻기 위해서는 연구지역 조건에 적합한 회전익 무인항공기 경로와 촬영기법을 고려한 비행계획이 수립되어야 한다. 비행경로와 촬영기법에 따라 촬영 대상 범위가 결정되므로 위험요소나 촬영 대상 크기를 확인해야 할 필요성이 있다. 또한 촬영기법이 3차원 모델을 정확하게 구현하는데 영향을 미치므로 최적의 촬영기법을 결정해야 한다. 이러한 사항들을 고려해서 본 연구에서 는 독립된 객체가 아닌 넓고 고도차가 있는 지면을 대상으로 촬영하기 때문에 일정한 높이에서 횡방향 및 종방향의 경로를 중첩하는 촬영기법을 적용하였다. 더군다나 촬영된 사진을 분석하기 위해 본 연구에서 사용된 포토스캔 프로그램은 다음과 같은 촬영기법을 요구하고 있다. 첫째, 사진은 다양한 각도로 촬영되어야 하며, 둘째, 최소 2개의 사진으로부터 보이는 기하학적 도형 배열을 이용하기 때문에 암존(blind-zones)을 최소화해야한다. 즉, 비행경로를 따라서 연속해서 찍은 2개의 사진은 80%의 중첩(forward overlap)을 가져야하고, 평행한 비행경로 상의 2개 사진은 60%의 중첩(side overlap)을 가져야한다. 셋째, 보다 좋은 품질의 결과를 얻기 위해서 좋은 조명 상태에서 촬영해야한다. 그리고 지리정보 기준작업(georeferencing)을 수행하는 경우, 기하학적 정밀도를 높이기 위해 지상기준점들이 고르게 분포되어 있어야 한다. 일정한 고도와 간격의 항공사진 촬영을 하기 위해 Fix 4D Capture 어플리케이션을 사용하여 자동모드로 비행을 실시하였다. 연구지역의 경우 범위가 넓고, 고도차가 크며, 현장 주변에 수목이 우거져 있고, 대형장비들도 배치되어 있는 상태이기 때문에 비행경로는 3차원 모델 구현의 정확도를 향상시키기 위해 횡 및 종 방향 경로를 중첩하여 2회 촬영하였다(Fig. 7).
포토스캔을 이용한 3차원 모델링
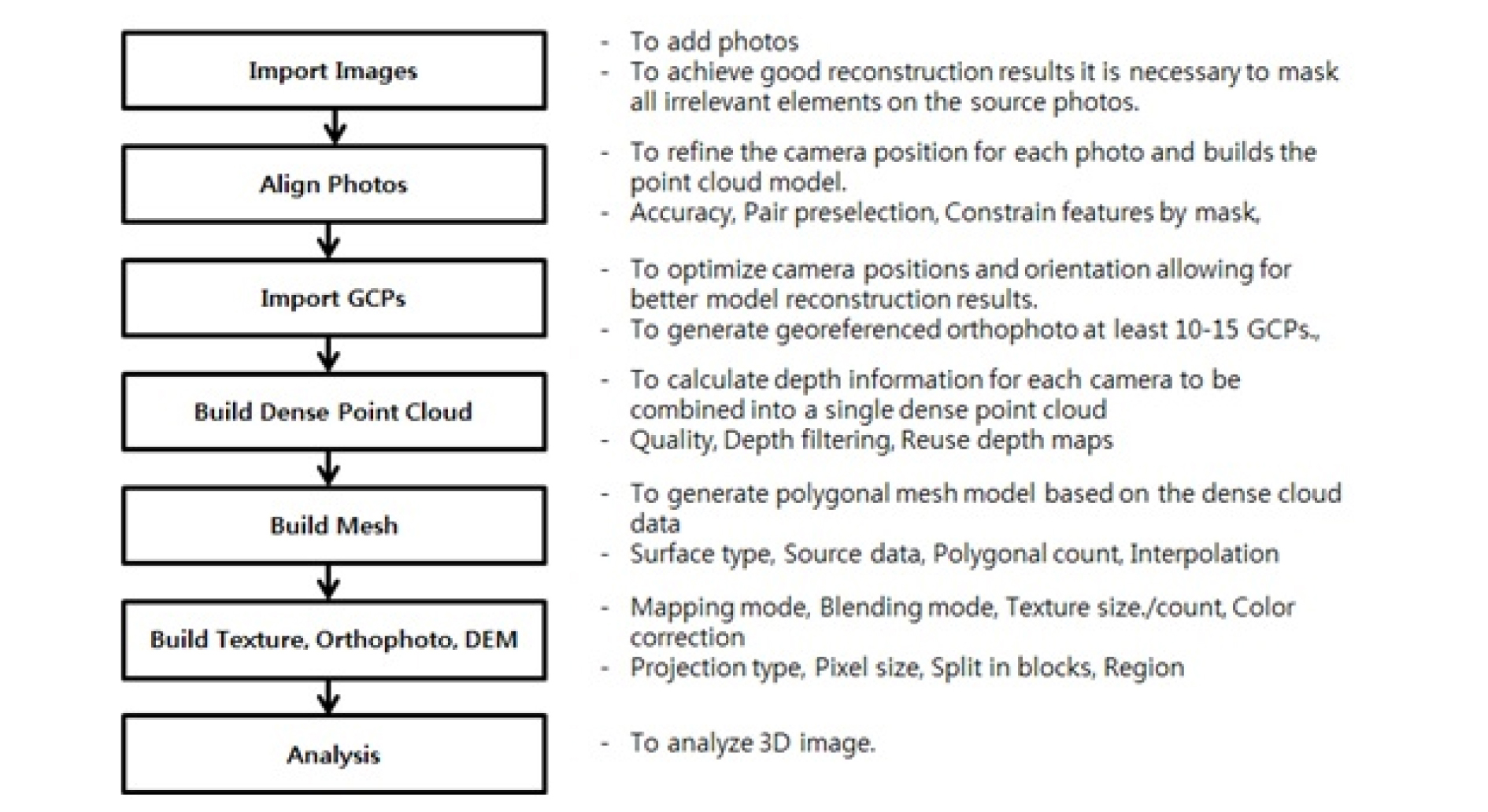
회전익 무인항공기로 촬영된 항공사진은 Agisoft사의 포토스캔 프로그램을 이용하여 3차원 모델링을 실시하였으며, 그 처리과정은 Fig. 8과 같다. 포토스캔으로 불러온 항공사진들 중 0.5 이하의 낮은 품질의 항공사진들은 정밀도에 영향을 미치므로 제외시켰다. 사진 정렬(align photos)은 각 사진에서 중요하게 고려되어야할 객체 점들의 상한과 각 사진에 대한 매칭 점들의 상한을 설정해야 하는데, 이것은 이후 처리해야 할 조밀 점군(dense point cloud)의 기초 자료로 활용된다. 사진 정렬이 완료되면 포토스캔 내에서 예측된 카메라 위치들에 기반을 두고 각 카메라에 대한 심도 정보(depth information)를 계산한다. 각 카메라에서 계산된 심도 정보는 조밀 점군에 적용된다. 이렇게 생성된 조밀 점군으로부터 메시 형성, 3차원 모델 텍스처(3-dimensional model texture), 고해상도의 3차원 모델 가시화를 가능케하는 타일 모델(tiled model), 수치고도모델(Digital Elevation Model, DEM), 수치지형모델(Digital Terrain Model, DTM), 그리고 정사영상(orthomosaic) 등을 만들 수 있다. 본 연구에서는 총 4회에 걸쳐 항공사진을 촬영하였다. 각 회별로 촬영한 사진의 수와 지상기준점의 위치는 촬영범위, 현장과 기상조건에 따라 조금씩 다르게 적용되었다. 포토스캔 프로그램을 이용한 필터링 작업은 disable, mild, moderate, aggressive 등 4가지 형태가 있으며, 지형과 같이 복잡하고 정밀도를 요하는 경우는 aggressive가 적절하다. 따라서 본 연구에는 aggressive depth filtering을 적용하였다.
노천석회석광산 채굴량 분석
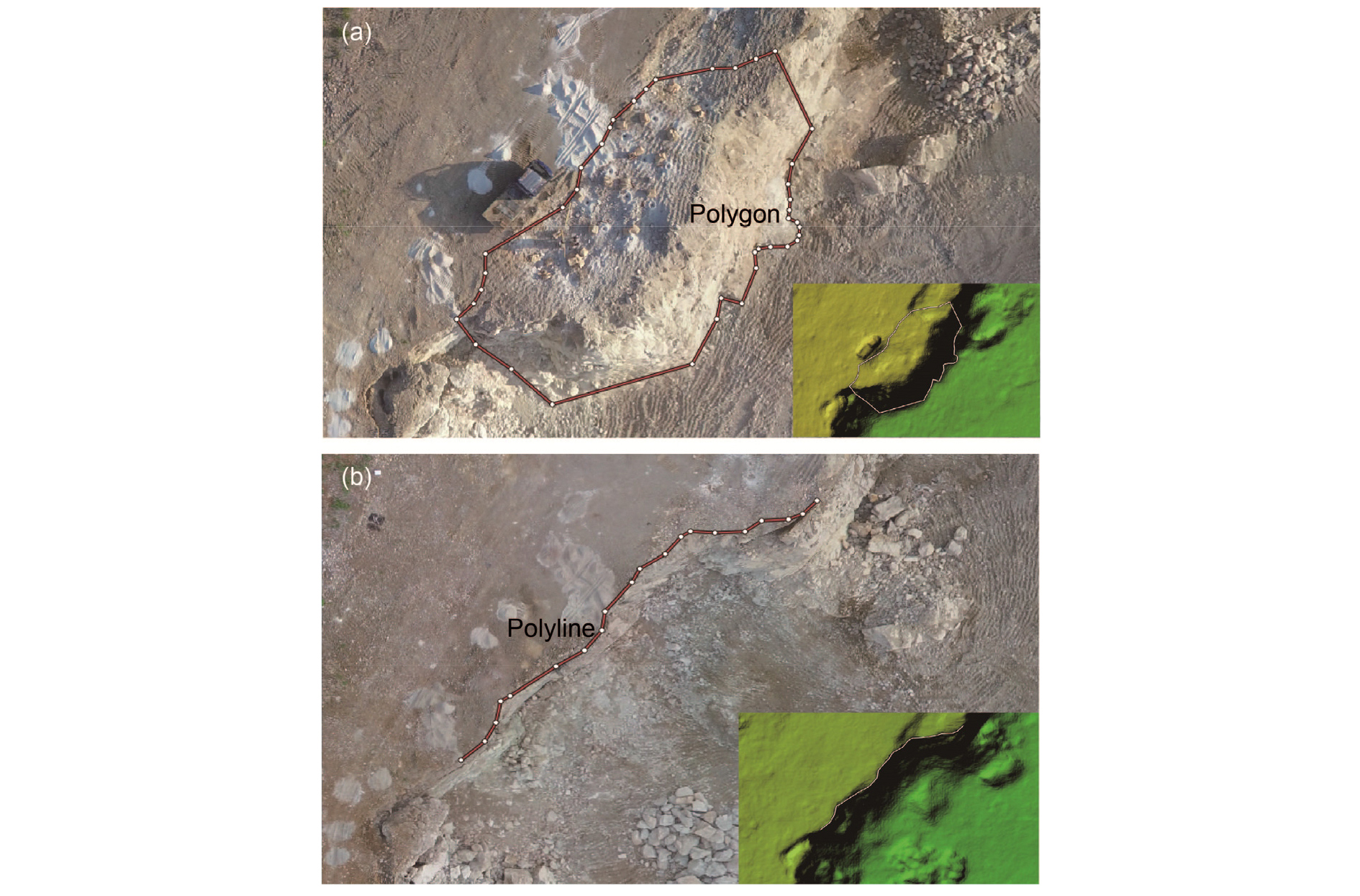
일반적으로 사면 안정성을 평가하기 위해서는 현장조사를 통해 대상사면에 대한 다양한 지질학적 및 지질공학적 정보를 획득해야 한다. 하지만 대규모 사면이나 접근이 쉽지 않은 사면의 경우 사면 분석에 필요한 자료를 획득하는데 많은 시간이 소요되거나 실측이 어려워 조사하는데 어려움이 따른다. 노천광산에서 광석의 채굴량을 산정해야 하는 경우도 이와 비슷하다. 즉, 규모가 큰 노천광산의 경우 대규모로 발파가 이뤄지기 때문에 이에 따른 채굴량도 대량으로 발생하므로 그 부피를 정확하게 산정하는 것이 매우 어렵다. 본 연구에서는 촬영된 영상을 3차원 모델로 변환시켜 완성된 고해상도의 정사영상으로부터 수치지형모델을 분석하여 발파 전과 후의 지형차를 비교·분석하여 채굴량을 산정하였다. 즉, 발파 전후의 수치지형모델을 겹쳐서 변화된 지형을 확인하여 폴리라인(polyline)으로 표시한 다음 정사영상으로 확인하여 부피 측정이 가능하도록 폐합된 다각형(polygon)을 만들었다. 포토스캔 프로그램은 수치지형모델 내 폐합된 다각형의 부피와 면적 계산이 가능하므로 이를 이용하여 채굴량을 산정할 수 있다(Fig. 9).
3차원 영상 분석 결과
1차 영상 분석
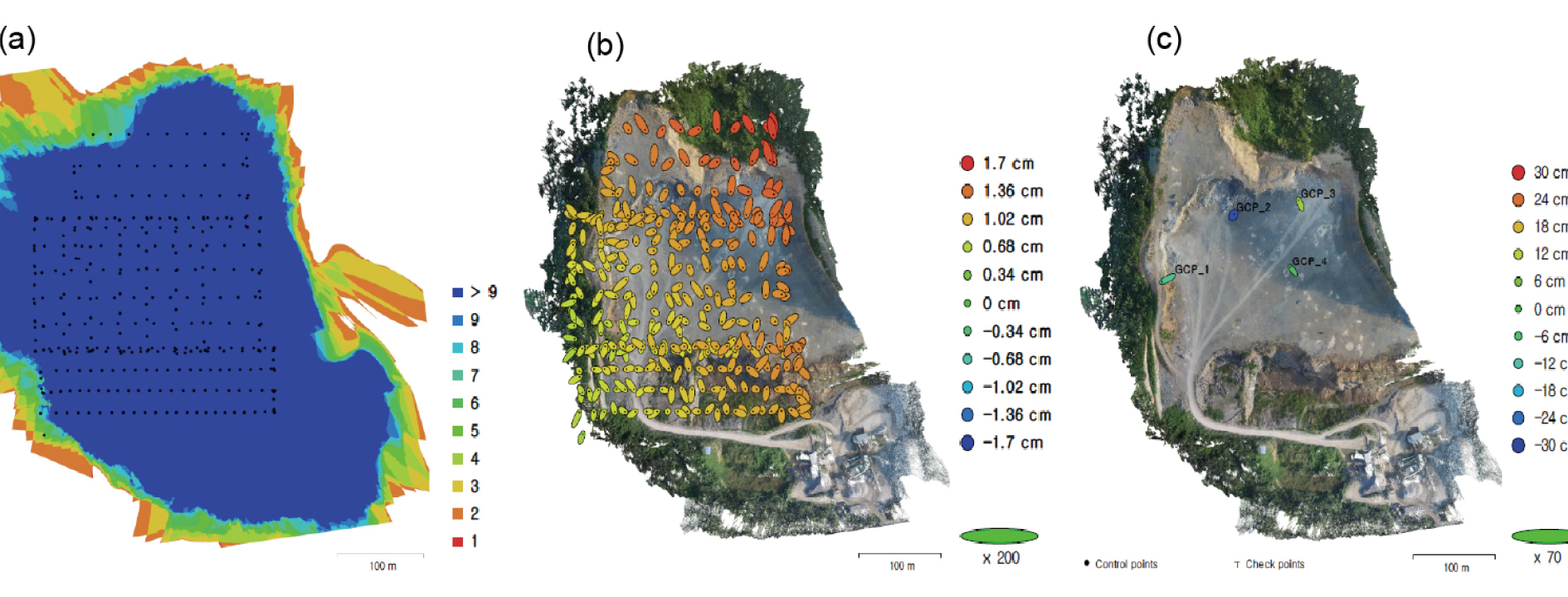
회전익 무인항공기를 이용하여 노천석회석광산 채굴장에서 촬영된 총 349장의 영상 중 점군 데이터 생성 시 기초가 되는 영상 중복도는 모두 9장으로 높은 화질의 구현도 표현이 가능한 것으로 나타났다(Fig. 10(a)). 이들 중복된 영상 중 품질이 0.5이하로 낮아 자료 처리 시 결과에 부정적인 영향을 줄 수 있는 7장의 영상은 제외시켰다. 결과적으로 3차원 모델링은 342장의 영상을 이용하여 실시하였다. 항공사진 촬영에 사용된 카메라 X3의 초점거리는 3.61 mm, 분해능은 4000×3000, 픽셀 크기는 1.56×1.56 m다. 카메라 캘리브레이션을 통해 왜곡도를 보정한 후 측정된 촬영 위치에서의 각 축방향 오차는 X(longitude)축 2.92 cm, Y(latitude)축 3.42 cm, Z(altitude)축 1.07 cm로 나타났다(Table 3). 이들 값은 10 cm미만으로 3차원 영상에서 항공사진 촬영 시 생길 수 있는 오차가 작기 때문에 3차원 모델형성 시 광산을 정확하게 표현가능하다(Fig. 10(b)). 또한 무인항공기에 내재되어 있는 GPS의 오차를 줄이기 위해 사용된 지상기준점(GCP)의 위치와 오차는 Table 3과 Fig. 10(c)에서 보여준다. 지상기준점 1(GCP-1)의 오차는 23.38 cm, GCP-2는 28.64 cm, GCP-3은 16.38 cm, GCP-4 14.04 cm로 나타났다. 3차원 영상 분해능은 12.6 cm/pix, 포인트 밀도는 62.5 points/m2로 각각 나타났다. 노천석회석광산 현장 관리를 하기 위한 방안으로 무인항공기를 이용한 1차 영상 분석에 의해 채굴량을 조사하였다. 채굴량은 현장에서 회전익 무인항공기에 의해 획득된 발파 전과 후의 위치데이터 차이로부터 부피를 계산하여 구하였다. 그 결과 1차당일 채굴량은 982.975 m3로 나타났다.
2차 영상 분석
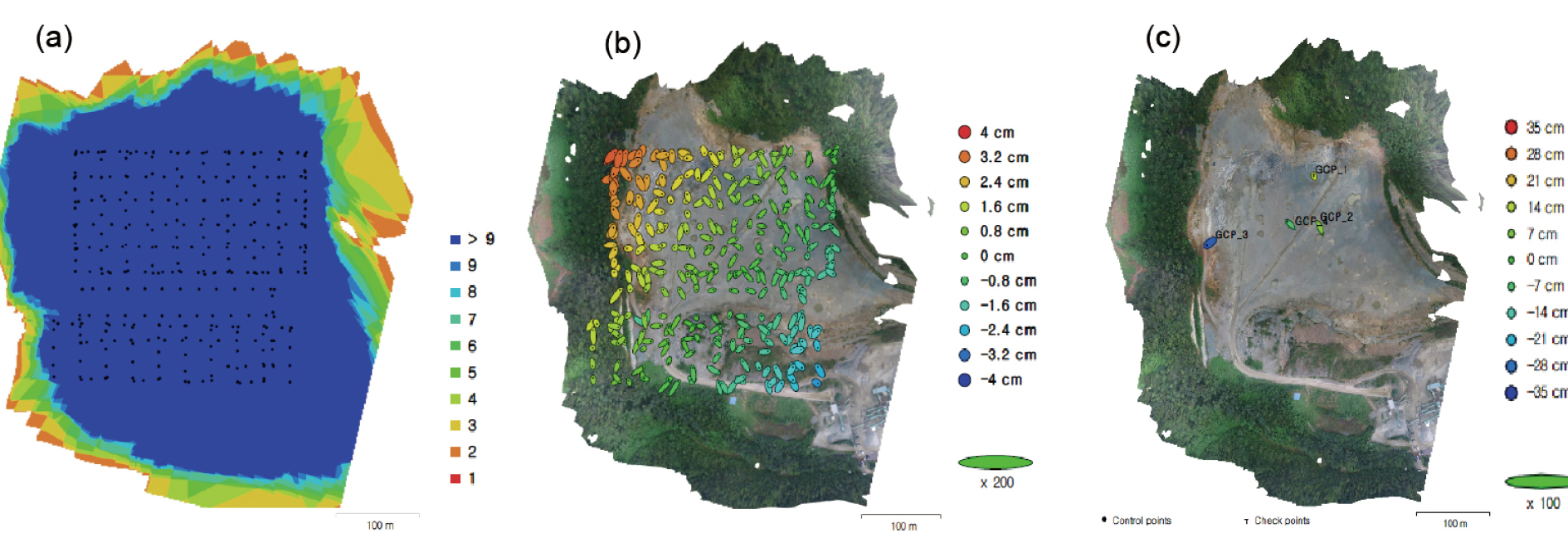
노천석회석광산 채굴장에 대한 2차 항공사진을 촬영하였으며, 1차 영상 분석과 같은 방법으로 영상을 분석하였다. 그 결과는 Table 3에 정리하였다. 현장에서 촬영된 항공사진은 총 343장이고, 품질이 낮은 7장의 사진을 제외한 총 335장의 영상을 이용하여 3차원 모델링을 실시하였다. 이들 사진 중 채굴장과 채굴 시설이 밀집된 지역을 제외하면 영상 중복도는 9장으로 나타났다(Fig. 11(a)). 카메라 캘리브레이션을 통해 왜곡도를 보정한 후 측정된 촬영 위치에서의 각 축방향 오차는 X축 2.74 cm, Y축 3.57 cm, Z축 1.48 cm로 나타났다(Table 3). 이들 값도 1차 영상 분석때와 같이 3차원 영상에서 항공사진 촬영 시 생길 수 있는 오차가 10 cm미만으로 작기 때문에 3차원 모델형성 시 광산을 정확하게 표현할 수 있다(Fig. 11(b)). 무인항공기에 내재되어 있는 GPS의 오차를 줄이기 위해 사용된 지상기준점(GCP)의 위치와 오차는 Table 3과 Fig. 11(c)에서 보여준다. GCP-1의 오차는 14.44 cm, GCP-2는 16.02 cm, GCP-3은 32.07 cm, GCP-4는 12.95 cm로 나타났다. 3차원 영상 분해능은 1.6 m/pix, 포인트 밀도는 0.391 points/m2로 각각 나타났다. 노천석회석광산 현장에서 회전익 무인항공기에 의해 획득된 발파 전과 후의 위치데이터 차이로부터 계산된 2차 당일 채굴량은 1100.9 m3로 산정되었다.
3차 영상 분석
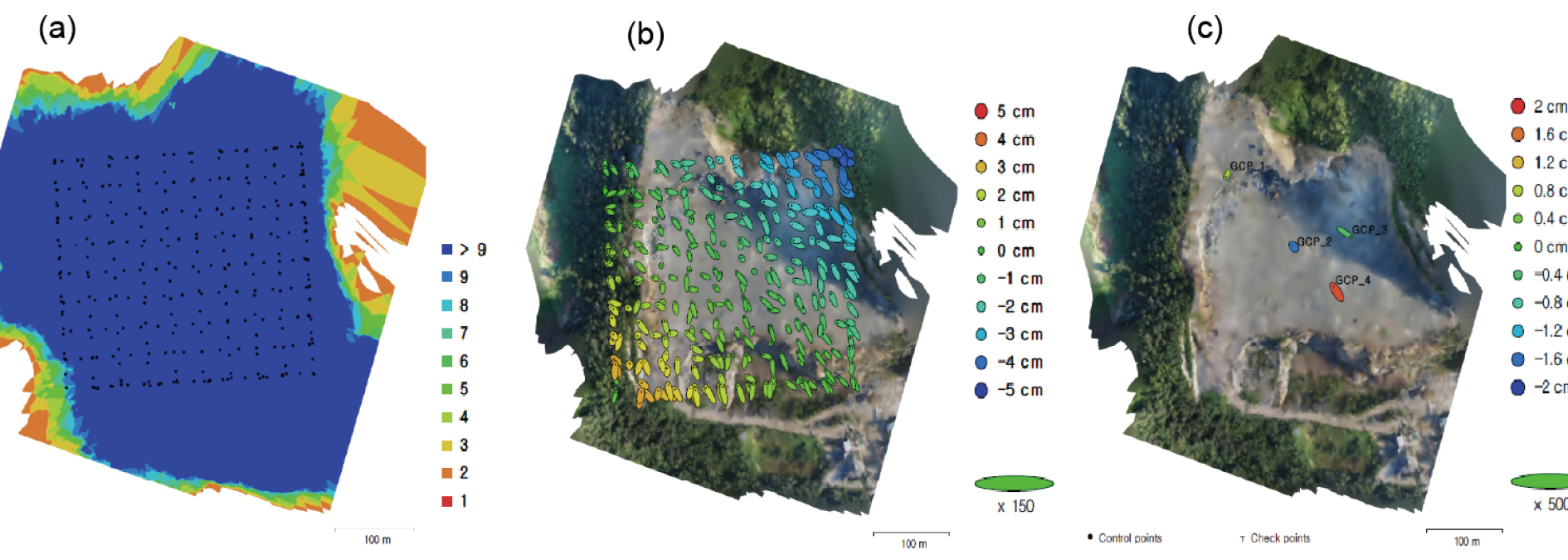
노천석회석광산 채굴장에 대한 3차 항공사진을 촬영한 후 분석을 실시하였으며, 그 결과는 Table 3와 같다. 현장에서 촬영된 항공사진은 총 310장이고, 품질이 낮은 7장의 사진을 제외한 총 303장의 영상을 이용하여 3차원 모델링을 실시하였다. 이들 사진 중 채굴장과 채굴 시설이 밀집된 지역을 제외하면 영상 중복도는 9장으로 나타났다(Fig. 12a). 카메라 캘리브레이션을 통해 왜곡도를 보정한 후 측정된 촬영 위치에서의 각 축방향 오차는 X축 4.50 cm, Y축 5.86 cm, Z축 1.91 cm로 나타났다(Table 3). 이들 값도 3차원 영상에서 항공사진 촬영 시 생길 수 있는 오차가 10 cm미만으로 작기 때문에 3차원 모델형성 시 광산을 정확하게 표현 가능하다(Fig. 12b). 무인항공기에 내재되어 있는 GPS의 오차를 줄이기 위해 사용된 지상기준점(GCP)의 위치와 오차는 Table 3과 Fig. 12c에서 보여준다. GCP-1의 오차는 1.30 cm, GCP-2는 1.85 cm, GCP-3은 3.37 cm, GCP-4는 3.53 cm로 나타났다. 3차원 영상 분해능은 27.7 m/pix, 포인트 밀도는 13 points/m2로 각각 나타났다. 노천석회석광산 발파 전후의 채굴량을 2차 영상 분석을 통해 계산한 결과, 3차원 영상의 분해능은 27.7 m/pix, 포인트 밀도는 13 points/m2오 나타났다. 노천석회석광산 현장에서 회전익 무인항공기에 의해 획득된 발파 전과 후의 위치데이터 차이로부터 계산된 3차 당일 채굴량은 762.556 m3로 산정되었다.
결 론
4차 산업혁명과 융합된 기술로서 회전익 무인항공기인 드론을 활용하여 노천석회석광산 채굴장에 대한 3차원 모델링과 화약발파 전후의 위치데이터 차이에 의한 채굴량 분석을 실시하였다. 그 결과로부터 다음과 같은 결론을 얻었다.
본 연구의 목적을 위하여 노천석회석광산 채굴장을 대상으로 총 3회의 회전익 무인항공기 영상 촬영을 실시하였으며, 그 결과 3회 모두에서 영상 중 점군 데이터 생성 시 기초가 되는 영상 중복도가 모두 9장으로 높은 화질의 구현도 표현이 가능한 것으로 나타났다. 카메라 캘리브레이션을 통해 왜곡도를 보정한 후 측정된 촬영 위치에서의 각 축방향 오차는 3회 모두 10 cm 이하의 허용가능 범위 내로 나타났다. 이러한 사실은 3차원 영상에서 항공사진 촬영 시 생길 수 있는 오차가 작기 때문에 3차원 모델형성 시 본 노천석회석광산의 채굴장 모니터링이 가능함을 지시한다. 화약발파 전후의 위치데이터 차이에 의해 계산된 채굴량의 경우 1차에서는 982.975 m3, 2차에서는 1100.9 m3, 3차에서는 762.556 m3으로 각각 산정되었다. 즉, 노천석회석광산의 채굴량 산정은 회전익 무인항공기를 이용함으로써 짧은 시간에 비교적 빠르고 정확하게 얻을 수 있음을 의미한다. 결론적으로 회전익 무인항공기인 드론을 활용하여 노천석회석광산의 채굴장 모니터링과 채굴량 산정이 충분히 가능할 것으로 판단된다. 또한 이 방법은 향후 노천광산뿐만 아니라 건설 현장이나 도로사면 등의 주기적인 모니터링에 적극 활용될 수 있을 것으로 기대된다.
