

서 론
우리나라에는 다목적 댐, 홍수예방 댐, 생활 및 공업용수 댐, 발전용 댐, 농업용 저수지와 상수원 댐 등 약 17,000 여개가 있으며 이 가운데 88%는 50년 이상 지난 것이다(ME, 2020). ‘시설물의 안전관리에 관한 특별법’, ‘농어촌정비법’에 따라 매년 정기점검과 안전진단을 실시하여 댐과 저수지를 관리하고 있다. 40년 이상 오래된 댐과 저수지는 누수, 사면활동 등 결함이 있는 경우 안전성에 문제가 발생할 수 있다(Park et al., 2005). 수리시설물은 시간이 지나면서 성능이 떨어지고 안전성에 문제가 발생하기 마련이다. 대부분 댐이나 제방은 건설 후 시간이 지날수록 내부침식으로 누수가 발생하고 댐체 구조 안정성에 변형이 일어난다(Flores-Berrones et al., 2011). 댐체 내부 균열, 암반에 있는 불연속면에서 존재하는 침투수는 강우량이 많아지면 저수지, 하천 수위가 높아지고 침투수 수압도 상승하게 된다. 따라서 불연속 주변 공극수압(pore pressure)이 발생하여 흙 입자가 이동하는 파이핑(piping) 현상이 일어난다. 파이핑은 댐이나 저수지 안전성을 해치는 주 원인이 된다(Wan and Fell, 2008; Bonelli and Nicot, 2013).
내부침식으로 일어나는 파이핑 파괴는 찾아내기가 어렵다. 댐이나 제방 안정성 조사와 감시에 다양한 물리탐사 방법을 적용한다. 저수지 제방 누수 조사에 지온탐사와 다점온도 검층을 이용하거나(Park and Kim, 1999), 전기비저항 탐사(Chung et al., 1992; Song et al., 2000, 2001b; Park et al., 2005; Sjodahl et al., 2008; Kim et al., 2013), 자연전위(self-potential) 탐사(Song et al., 2000, 2021a), 지피알(ground penetration radar, GPR) 탐사(Prinzio et al., 2010; Loperte et al., 2011)를 이용하기도 한다. 또한 실시간, 장기간 댐 안정성 감시를 위한 전기비저항 탐사도 활용하고 있다(Kayode et al., 2018; Masi et al., 2020; Norooz et al., 2024). 전기 및 전자 탐사는 댐체내부에 존재하는 물에 대한 반응을 직접 측정한다(Panthulu et al., 2001; Ikard et al., 2012). 지피알 방법은 비교적 양호한 지하 내부구조를 확보할 수 있어 암상분포를 확인하거나 4기 퇴적층 물성 특성화하는데 주로 이용한다. 그러나 지피알 신호가 미세 입자로 구성된 토양층에서는 심각하게 감쇄하므로 자연전위법과 전기 비저항 탐사법이 미세입자로 구성되어 있는 토양에서 누수가 있는 곳에 더 적합하다(Hirsch et al., 2008; Soueid Ahmed et al., 2020). 탄성파 굴절법을 이용하여 사력댐이나 제방 내부 균열을 감시하는 사례도 있다(Osazuwa and Chinedu, 2008). Planes et al. (2016)은 축소 댐 모형을 설치하여 파이핑 현상을 조사한다. 축소 댐 모형 내부 관을 통해 누수현상이 일어나게 한 다음 댐 경사면에 설치한 지오폰(20–400 Hz)으로 신호음을 기록하고 그 변화를 분석한다. 그 결과 배경 잡음을 이용하는 수동 탄성파 탐사가 댐체 안정성 감시에 적용할 수 있는지 가능성을 제시한다.
차량진동 에너지를 이용하는 수동 탄성파 탐사를 이용하여 댐 구조를 영상에 이용한 사례도 있다(Aguiar and Maciel, 2022). 수동 탄성파 감시(passive seismic monitoring)는 지진예측(Kaushal et al., 2025), 활성단층 감시(Ferrazzini et al., 1991), 대륙판 경계면(Sens-Schonfelder and Wegler, 2011), 탄화수소 저류층(Liang et al., 2023)이나 지열 저류층에서 단층대 움직임 감시에 주로 이용한다(Sens-Schonfelder and Wegler, 2006; Zhang et al., 2024). 또한 수압파쇄 후 파쇄대 변화, 탄화수소나 지열 저류층에서 투수율 변화를 살펴보거나 광산개발, 핵 폐기물 저장소 굴착 안정성, 지구조 안정성 문제(geotechnical stability), 고갈 유가스전, 염대수층, 석탄층에서 이산화탄소 지중저장 안정성 문제에도 응용하고 있다(Ugalde et al., 2013). 수동 탄성파 탐사는 인위적인 송신음원을 사용하지 않고 자연상태에서 늘 존재하는 미소진동 음원이나 항공기, 기차, 차량이동, 토목 건설 공사와 같은 생활잡음 음원으로 발생하는 진동을 이용하여 지구내부 구조를 확인하는 방법이다(Brenguier et al., 2020).
이 연구에서는 수동 탄성파 탐사를 사력댐 안정성 감시를 위한 탄성파 파 속도구조 파악과 실시간 안정성 감시에 적용할 수 있는지를 살펴본다. 수동 탄성파 탐사를 이용하는 사력댐 안정성 감시 과정은 i)수동 탄성파 자료확보, ii)그린함수 구하기, iii)시간-주파수 영역 변환, iv)심층학습 이용 속도변화 확인으로 볼 수 있다. 위 과정을 수치모형 실험을 통해 살펴보고 현장자료에 적용해본다. 수치모형 실험에서는 다양한 상하 지층 물성차이에 대해 지층반사계수를 구하고 인공합성 탄성파 신호음을 생성한다. 각 수진기에 기록한 탄성파 신호음은 가보 변환(Gabor transform)(Gabor, 1946)을 이용하여 시간-주파수 영역 스펙트럼을 구하고, 영상으로 변환하여 심층학습에 필요한 학습자료와 검증자료를 준비한다. 가보 변환은 시계열 신호자료에 푸리에 변환을 적용할 때 시간 구간을 제한하고 정규분포 윈도함수(Gaussian window function)를 적용한 것이다.
시간-주파수 스펙트럼 영상에서 물성차이 확인과정은 기계학습 분야의 하나인 심층학습(deep learning)을 적용한다. 이 가운데 순환곱 신경망(convolutional neural network, CNN)(LeCun et al., 1998)을 이용한다. 탄성파 자료처리에서 기계학습을 이용하는 경우는 주로 취득자료 품질이 좋지 않거나 물리적 이론에 기반한 자료처리 방식 적용이 어려운 경우, 복잡한 자료를 유연하게 처리해야 하는 경우이다(Harsuki and Alkhalifah, 2022). 기계학습은 인공지능의 한 분야로 명시적인 지시없이 자료로부터 학습하고 매개변수 값을 지속적으로 업데이트하여 예측이나 추론 또는 결정을 하는 것을 말한다(iso.org).
심층학습은 인간두뇌가 사물을 인식하는 방식과 유사하게 입력자료로부터 가장 낮은 단계에서 가장 높은 단계까지 여러 계층을 구성하여 계층에 따라 특징을 찾아내고 각 신호에 해당하는 의미를 파악하는 것이다(LeCun et al., 2015). 지구물리분야에서도 자료처리 기술발전, 다양한 심층학습 알고리즘 개발, 컴퓨터 성능향상 등으로 심층학습 적용이 점점 늘어나고 있다. 이 가운데 CNN이 여러 분야에서 효과를 나타내고 있다. 대표적인 CNN 적용사례로 지진탐지 분야(Azuma et al., 2024; Zhexebay et al., 2025), 탄성파 실체파 위상 찾기(Zhu et al., 2019; Tokuda and Nagao, 2023), 탄성파 암상(Qaedi et al., 2024; Komara et al., 2025), 무작위 잡음제거(Cho and Pyun, 2023), 지진파 초동주시 자동 선택(Wang et al., 2019; Ozawa, 2023), 탄성파 단면도에서 단층이나 구조예측(An et al., 2023; Zhang et al., 2024), 탄성파 역산(Ovcharenko et al., 2019; Park et al., 2021; Jo and Ha, 2023) 등을 들 수 있다.
댐체 안정성 감시를 위해 이용하는 심층학습은 주로 강수, 온도변화, 지하수위 등 외부요인과 댐체 내부 파이핑으로 발생하는 댐체 구조변형을 다양한 측정장치를 이용하여 시간단위로 기록한 시계열 자료를 분석에 적용하고 있다(Assumpcao et al., 2022; Wang et al., 2024; Su et al., 2025). 수동 탄성파 탐사를 이용하여 댐체 누수 감시하는 연구는 그린함수에 대한 분산곡선으로부터 탄성파 속도를 구하거나(Aguiar and Maciel, 2022) 그린함수에서 탄성파 도달 시간 변화를 통해서 속도변화를 확인하는 방법(Poupinet et al., 1984; Daskalakis et al., 2016; Planes et al., 2016) 위주로 진행하고 있다. 물리탐사에서는 댐체 내부에서 일어나는 물리적변화 감시에 중점을 두고 있어 댐체 변형을 측정하는 것과 차이가 있다. 이 연구에서는 그린함수에서 속도변화를 시간-주파수 영역으로 변환하고 그 영상을 심층학습을 이용하여 속도변화 차이를 확인하는 방법을 제안한다.
수치모델링, 학습자료 및 검증자료 확보
심층학습에 필요한 다양한 학습자료와 검증자료를 확보하기 위해 단순 2층 지층구조에서 속도, 밀도 변화에 따라 달라지는 모델링 과정을 살펴본다. 파 평면파가 물성이 다른 지층경계면에 도달할 때 발생하는 반사계수, 굴절계수는 죠프리츠(Zoeppritz) 방정식으로 표현할 수 있다(Zoeppritz, 1919). 전파하는 탄성파 에너지는 경계면에서 모드변환(mode conversion)이 발생하므로 반 무한 균질 탄성매질에 파가 입사할 경우 반사하는 파와 파 그리고 굴절하는 파와 파가 발생한다. 상하 지층 물성과 입사각에 따라 반사 또는 굴절 되는 파, 파 진폭이 달라진다. 옵셋(음원-수진기 사이 거리)에 따라 달라지는 진폭을 분석하여 저류층 특성을 파악하는데 주로 이용한다. 죠프리츠 방정식을 행렬형태로 나타내면
이다. 여기서, , 는 파가 입사할 때 파, 파 반사계수이며, , 는 파, 파 굴절계수이다. , 는 파 입사각과 굴절각이고, 𝜙1, 𝜙2는 모드변환 된 파 반사각과 굴절각, 𝜌는 밀도(bulk density)이다. 첨자 1, 2는 상부층, 하부층이다. 죠프리츠 방정식은 변수가 네 개로 구성된 비선형 방정식으로 근사식을 이용하여 간접적으로 구한다. 상하 지층 속도차이에 따라 달라지는 입사각이 임계각보다 작은 경우 다양한 전제조건으로 방정식을 근사화할 수 있다. 많은 연구자들은 입사각 또는 음원-수진기 거리에 따라 변하는 진폭을 파악하기 위해 계산식을 단순화하거나 선형으로 변환하는 방법을 제안하였다.
이 연구에서는 Aki and Richards (1980) 식을 이용하여 파가 전파할 때 상하 지층의 다양한 물성에 따라 변하는 반사계수를 구하고 리커 파형과 순환곱을 적용하여 인공합성 탄성파 신호음을 생성한다. 파가 입사할 때 파 반사계수, 모드변환된 파 반사계수 그리고 파가 입사할 때 파 반사계수는
이다. 여기서, 변수 는 다음과 같다(Aki and Richards, 1980).
이 연구에서 수치모델링은 파가 입사할 때 지층경계면에서 모드변환 되어 반사된 파를 생성하고 지층물성에 따라 달라지는 시간-주파수 스펙트럼 변화를 살펴본다. 이때 탄성파 중합 단면도를 고려하여 입사각은 5°로 한다. 수치모형 실험에서는 탄성 균질매질에서 일차원 단순 지층을 설정하여 죠프리츠 방정식으로 반사계수를 계산한다. 이때 예상할 수 있는 속도모델은 네 개이다(Table 1).
Table 1.
Models of 1-D velocity comprise three layers and two interfaces for synthetic seismic signals
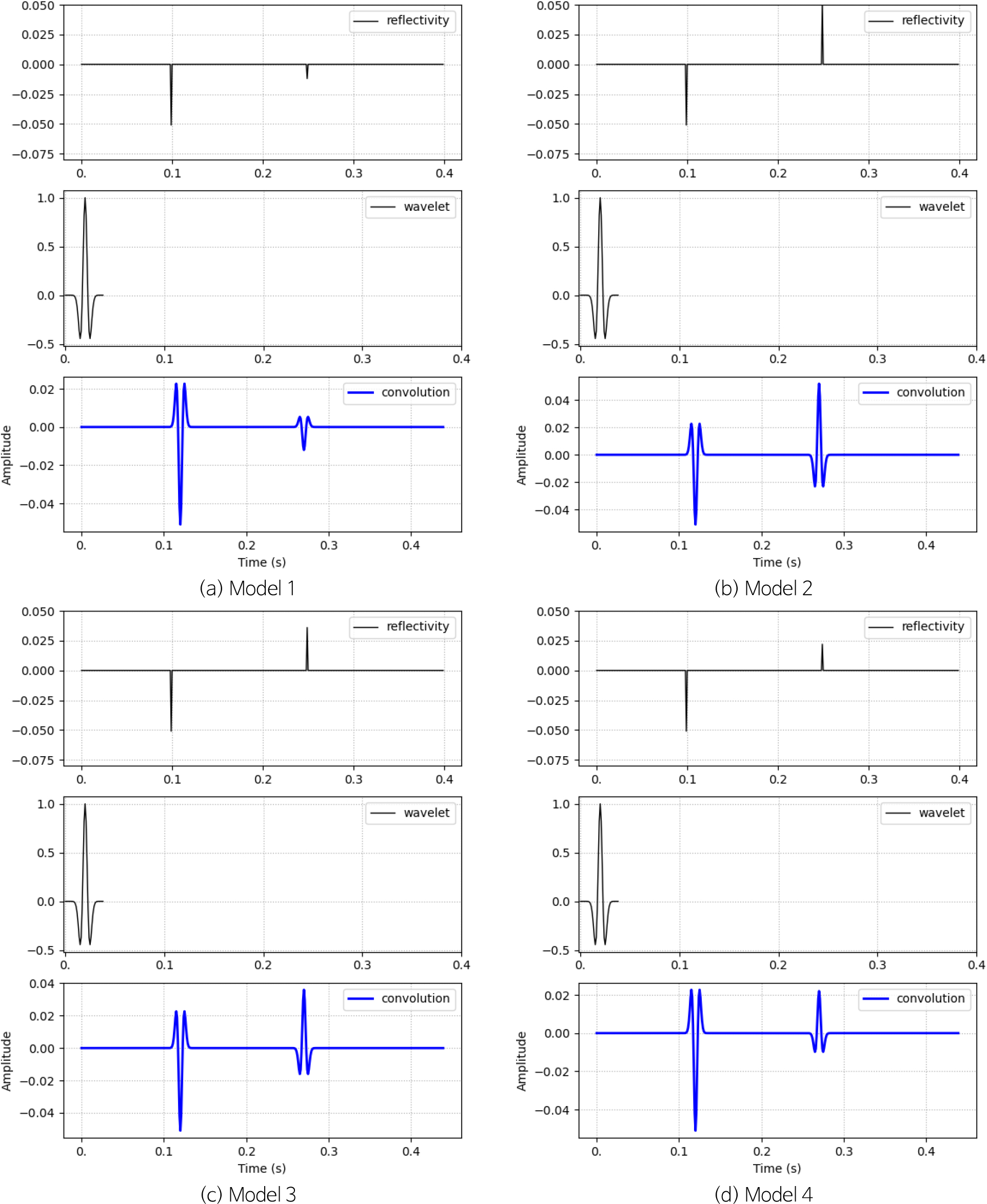
1차원 지층모델은 세 개 층과 두 개 지층 경계면으로 구성한다. 첫 번째 층과 두 번째 층 물성을 일정하게 하고 세 번째 층을 달리하여 설정한다. Model 1은 점점 속도가 증가하는 모델이다. Model 2는 두 번째 층 속도가 상하 지층 속도보다 큰 경우이다. Model 3과 4에서 첫 번째 층, 두 번째 층은 Model 2와 같고 세 번째 층 속도를 점점 증가한 모델이다. 각 지층모델에 대해 반사계수를 구하고 40 Hz 리커 파형을 적용하여 인공 탄성파 신호음을 구한다. 네 개 모델에 대한 모델링 결과는 Fig. 1에 있다. 물성에 따른 탄성파 신호음 차이는 주파수 영역에서 확인하는 것이 더 쉽다. 여기에서는 시간-주파수 스펙트럼 단면도를 구하여 물성차이 여부를 정성적으로 확인하고자 한다.
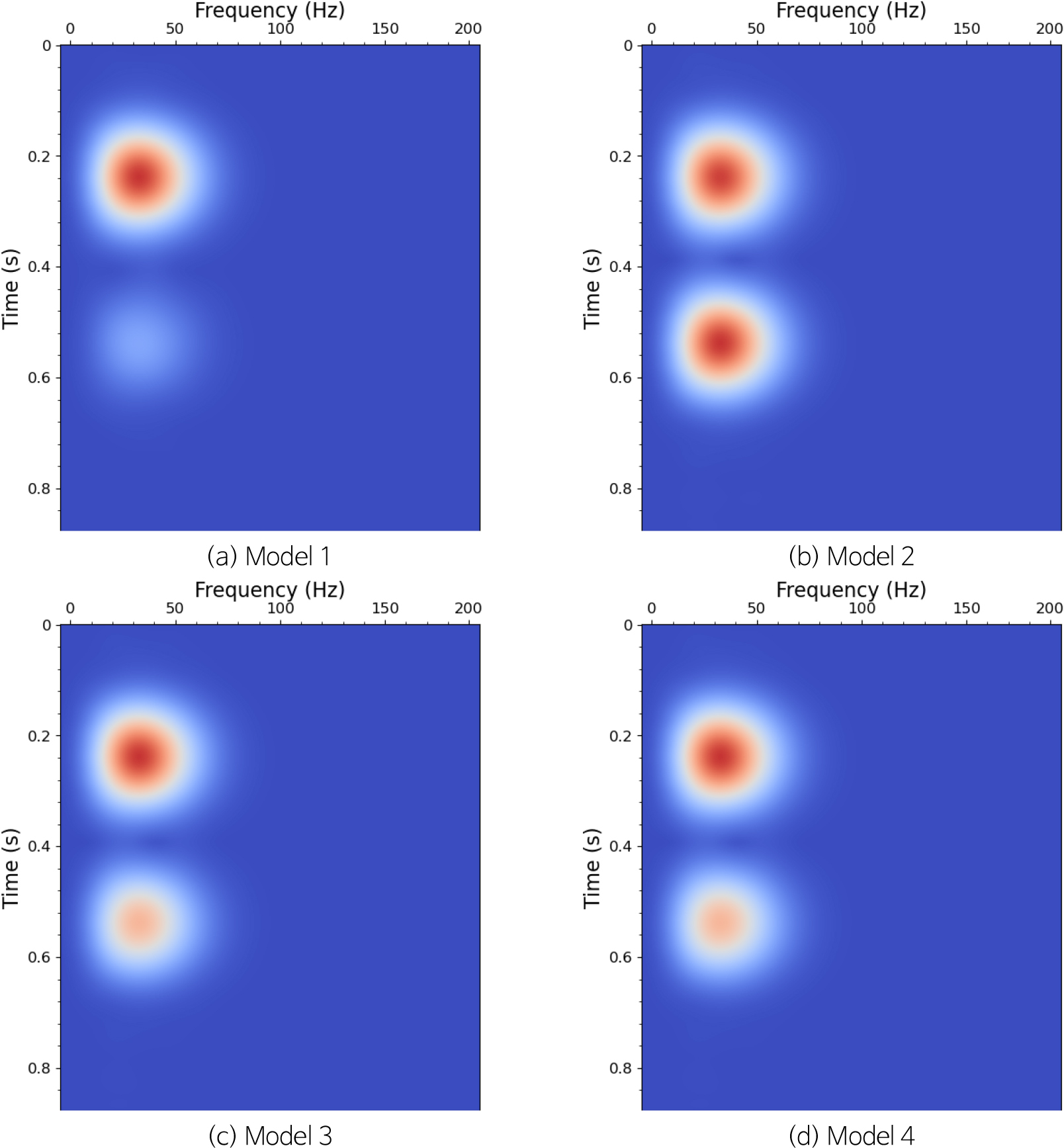
시간-주파수 스펙트럼 단면도는 시간영역 탄성파 신호에 정규분포 함수(Gaussian function)를 곱하고 푸리에 변환을 적용하는 가보(Gabor, 1946) 변환을 이용한다. 이때 이용한 정규분포에 해당하는 필터함수는 이다. 여기서, 는 시계열 함수의 중심 주파수, 𝛼는 이다(Dziewonski et al., 1969). Fig. 1에서 첫 번째 지층 경계면에서 반사계수는 모두 같다. 두 번째 지층 경계면에서 반사계수는 세 번째 층 물성을 각각 다르게 설정하여 구한 것이다. 인공 탄성파 신호는 지층 경계면에서 반사계수와 40 Hz 리커 파형요소와 순환곱 결과이다. Fig. 2는 네 개 인공 탄성파 신호에 가보변환을 적용하여 구한 시간-주파수 스펙트럼이다. 첫 번째 층과 두 번째 층 경계면에 해당하는 0.25 s 부근에서 시간-주파수 스펙트럼은 네 개 모델에서 같은 모양이다. 두 번째 층과 세 번째 층 경계면에서 스펙트럼은 세 번째 층 물성변화(, , 밀도)에 따라 0.5 s에서 시간-주파수 스펙트럼 분포가 다르게 나타나는 것을 확인할 수 있다. 그러므로 물성에 따라 달라지는 시간-스펙트럼 영상을 지층내부 물성 변화를 확인할 수 있는 가능성이 있다.
이 연구에서는 다양한 속도변화와 잡음을 포함한 인공 탄성파 신호를 생성하고 시간-주파수 스펙트럼 영상을 구한다. 시간-주파수 스펙트럼 영상 차이는 심층학습을 이용하여 비교하고 그 결과로 속도를 예측하는데 필요한 학습자료와 검증자료로 활용한다.
심층학습 이용 인공 탄성파 자료 속도 추정
심층학습은 탄성파 자료로부터 지층구조를 구하는 탄성파 영상화나 물성을 구하는 역산에 활용하는 기계학습 가운데 가장 확실한 방법중 하나이다. 이 연구에서는 탄성파 자료에서 속도변화 차이를 확인하는데 심층학습을 이용한다. 심층학습 가운데 CNN을 가장 많이 이용한다. CNN은 LeCun et al. (1998)은 LeNet-5를 발표하면서 시작한다. CNN은 픽셀로 구성된 영상자료를 행렬로 표현하고 필터링 또는 커널을 설정하여 모든 영역에 순환곱을 반복적으로 적용하여 특정 형태를 찾아가는 방법이다. CNN에서는 입력정보에서 특정한 정보만을 추출하고 학습에 사용하기 때문에 학습과정에서 발생하는 복잡한 연산량을 줄이면서도 필요한 정보를 충분히 활용할 수 있는 장점이 있다. 2012년 인공신경망을 여러 개 층으로 구성한 AlexNet (Krizhevsky et al., 2012) 등장한 이래 다양한 분야에서 심층학습을 적용하고 있다. CNN은 완전연결 계층과 달리 순환곱 계층(convolutional layer)과 풀링 계층(pooling layer)으로 구성된다. 풀링은 순환곱 상관값이 낮은 부분을 제거하여 차원을 줄여가는 과정이다. 이 연구에서는 최대 풀링(max pooling)을 적용한다.
CNN은 비선형 영상자료를 작은 단위로 분리해서 특정 양상을 찾는 과정으로 영상분류, 객체탐지, 얼굴인식, 의료영상 분석, 목적지 방향과 선택 등 다양한 분야에 적용하고 있다. 그러나, 과대적합(overfitting)을 방지하기 위해 많은 자료가 필요하다. 다양한 활성화 함수와 최적화 알고리즘 가운데 이 연구에서는 활성화 함수로 비선형인 ReLu (rectified linear unit)(Householder, 1941)를 이용한다. ReLU는 빠르게 수렴하는 미분함수로 구성되어 있어 역전파에 이용한다. 입력값이 “0”에 가깝거나 음수일 경우 기울기가 “0”이 되어 역전파를 수행하지 못한다. 손실함수가 최솟값을 찾아가는 과정인 최적화 알고리즘은 Adam (adaptive momentum estimation)(Kingma and Ba, 2015)을 적용한다. Adam은 기울기 지수평균과 기울기 제곱 지수평균을 이용하여 미분값이 “0”인 경우에도 작업을 수행할 수 있는 장점이 있다. 심층학습을 이용하여 지하 물성변화를 예측하는 것은 지층속도 변화에 따라 달라지는 모델링 결과에 대한 시간-주파수 스펙트럼 영상과 입력 트레이스의 시간-주파수 스펙트럼 영상이 가장 유사한 영상을 찾는 영상자료 분류문제이다.
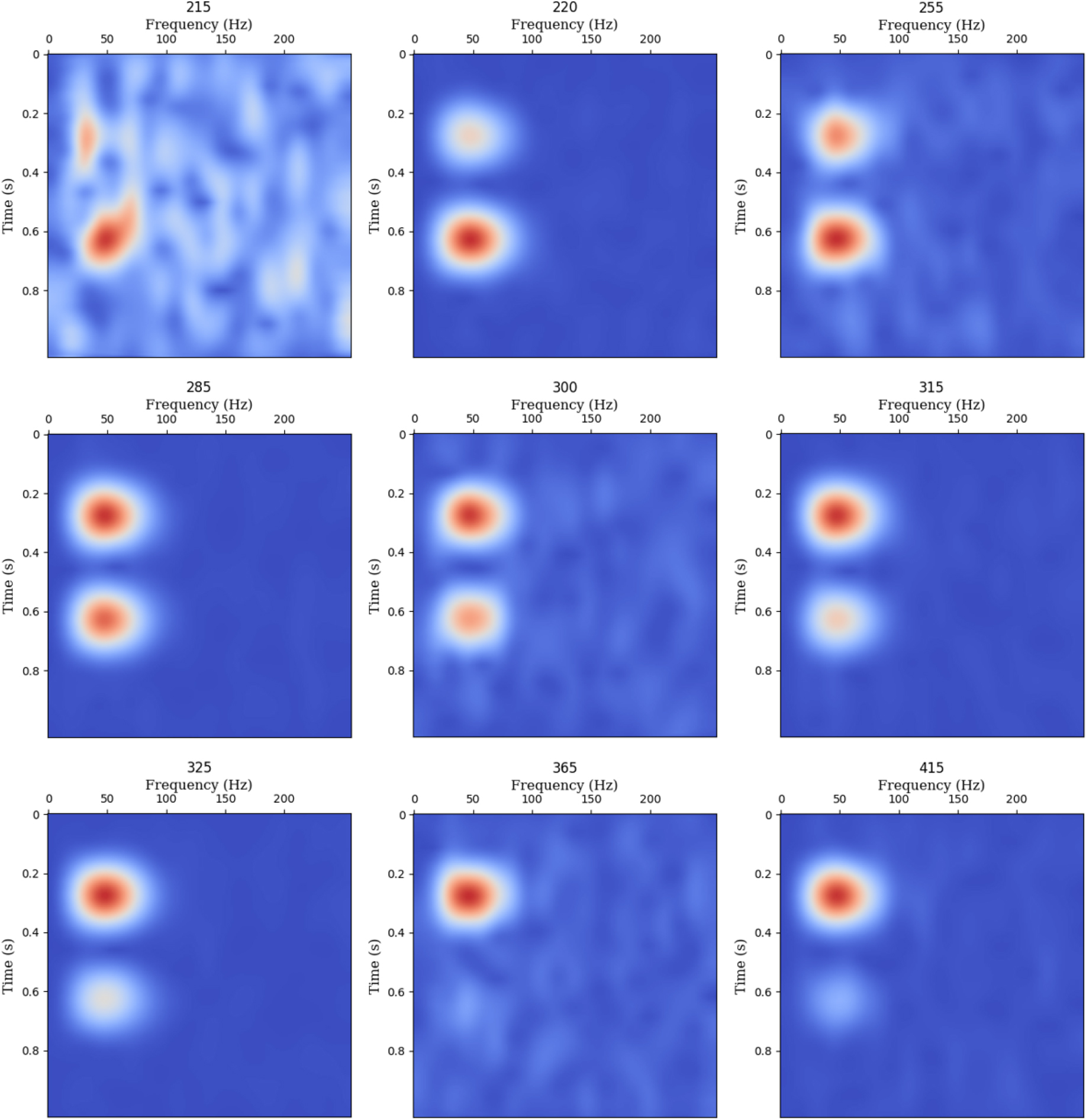
이 연구에서는 심층학습 가운데 CNN을 탄성파 모델링 자료에 적용하여 물성변화를 살펴보고 현장자료에 적용한다. 심층학습에 필요한 학습자료, 검증자료, 평가자료는 탄성파 모델링 결과인 트레이스 신호음을 시간-주파수 스펙트럼 영상으로 변환한 것이다. 학습자료 준비에 필요한 탄성파 모델링 자료는 일반적인 천부 탄성파 파 속도변화를 고려하여 하부층 파 속도변화를 200 m/s에서 500 m/s 까지 5 m/s 씩 증가시키면서 구한다. 이때 상부 층 파 속도는 420 m/s, 파 속도는 270 m/s, 밀도는 2.49 kg/cm3 설정한다. 여기에 신호대 잡음비(signal to noise, SNR)를 2%에서 98%까지 1%씩 가우시안 잡음(Gaussian noise)을 증가하면서 탄성파 모델링 자료를 준비하고 이에 대한 시간-주파수 스펙트럼 영상을 구한다. SNR이 낮은 경우는 잡음이 많이 포함된 것이고, 높은 것은 신호음이 위주로 기록된 것이다. Fig. 3은 다양한 속도변화에서 구한 탄성파 신호음에 대해 가보변환을 적용하여 구한 대표적인 시간-주파수 스펙트럼 영상이다. 각 그림 위쪽에 있는 숫자는 하부층 속도이고 단위는 m/s이다. 그림에서 속도가 215 m/s 스펙트럼 영상은 신호대 잡음비가 4%인 경우, 365 m/s 스펙트럼 영상은 26%, 325 m/s는 92%, 그리고 220 m/s, 285 m/s는 94%인 경우이다. 신호대 잡음비가 높을수록 균일한 배경을 나타냄을 알 수 있다. 시간-주파수 스펙트럼 영상자료는 전체 5,782개이고 이 가운데 학습자료는 전체자료의 80%인 4,625개, 검증자료는 전체자료의 20%인 1,156개로 설정한다.
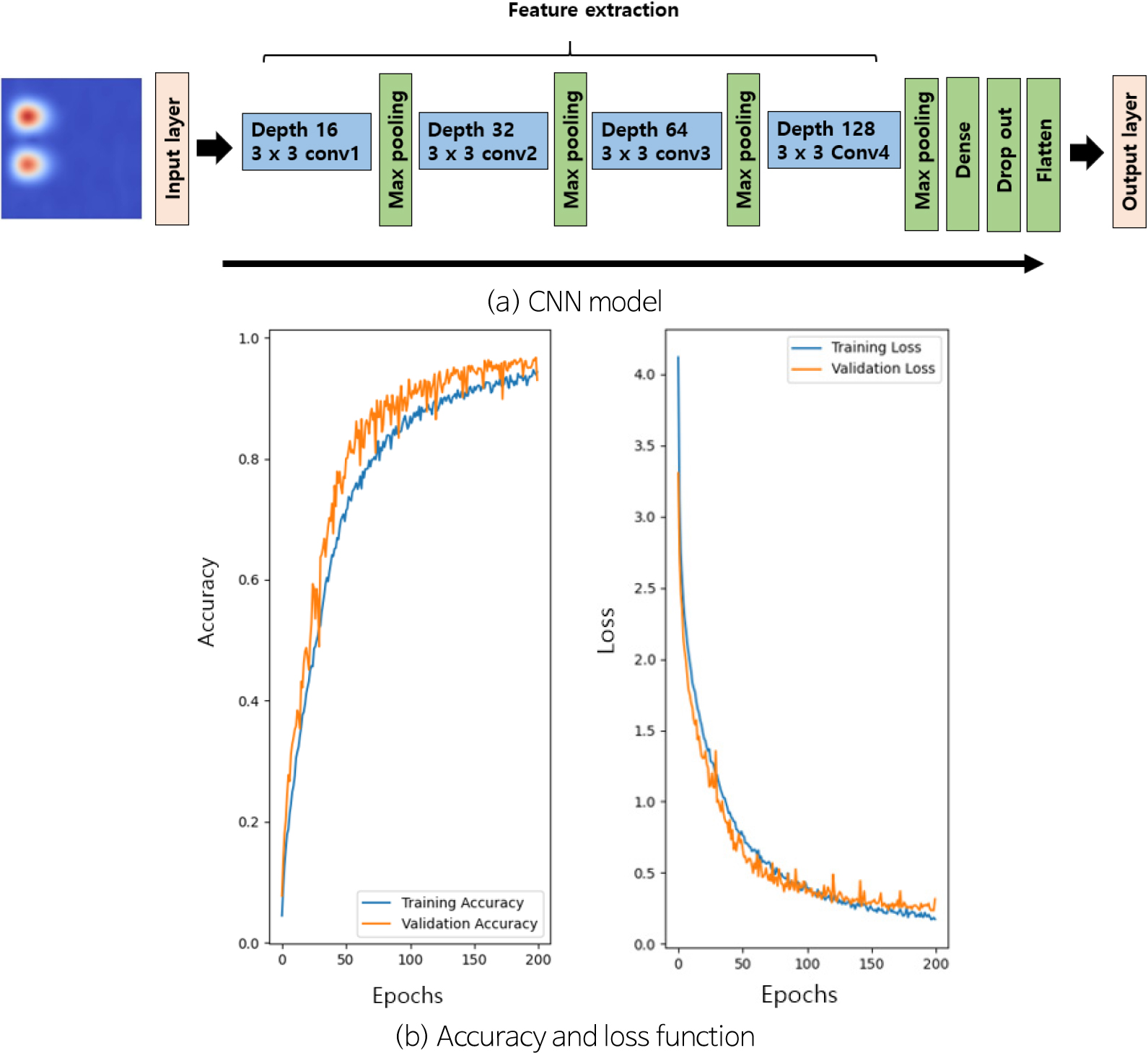
이 연구에서 CNN 심층학습은 케라스 순차모델(Keras sequentinal model, https://keras.io/guides/sequential_model/)을 이용한다. 이 모델은 각 층이 맥스 풀링 층을 갖고 있는 세 개의 순환곱 블록으로 구성된다. 완전 연결층은 상부에 128 유닛과 ReLU 활성화 함수로 구성된다. 일반적으로 검증 정확도가 학습 정확도보다 낮으면 과대적합이 발생하므로 모델을 설계할 때 참고해야 한다. 다양한 활성화 함수와 계층을 고려하여 최종 심층학습 모델을 결정하였다(Fig. 4a). 그림에서 보듯이 네 개의 3 × 3 순환곱 층을 선정하고 각 순환곱 층 다음에 2 × 2 최대 풀링 층을 선정한다. VGGNet-19 (Simonyan and Zisserman, 2015)은 영상분류에 많이 이용하는 심층학습 알고리즘 가운데 하나이다. 여기에서는 16 개 순환곱 층, 3 개 완전 연결층, 5 개 최댓값 풀링 층, 1 개 소프트 맥스 층으로 설계하여 적용해 보았으나 이 연구에서 다루는 영상 분류문제에서 손실함수를 크게 줄이는데 한계가 있어 2D CNN 모듈을 적용한다.
수치모델링 자료에 대한 심층학습 적용결과는 Fig. 4b에 있다. 학습자료와 검증자료 정확도는 “1”에 수렴하는 모습이다. 손실함수의 경우도 “0”에 수렴해 가는 과정을 나타내고 있다. 하부 층 속도가 330 m/s, 420 m/s인 평가자료에 대한 심층학습 적용결과는 각각 99.70%와 99.96% 정확도를 나타낸다. 시간-주파수 스펙트럼 영상은 물성에 따라 달라지는 탄성파 신호음을 반영하고 있지만 심층학습에서는 단순히 시간-주파수 스펙트럼 영상 차이를 비교한 것이다. 따라서 물성변화가 있는 곳에서 시간-주파수 스펙트럼과 그 외 지점에서 영상 차이 구별은 심층학습을 이용하는 것이다.
지금까지 수치모형 실험을 통해 지층속도 변화에 따라 나타나는 탄성파 신호음 차이를 시간-주파수 영역에서 심층학습을 적용하여 살펴보았다. 다음 절에서는 수동 탄성파 탐사를 사력댐 안정성 감시에 적용할 수 있는지 살펴본다.
현장자료 취득 및 처리
수동 탄성파 탐사는 “임의 수평지층에서 발생하는 굴절파 자기상관의 일방향 파동장은 반사파 파동장이 될 수 있다(Claerbout, 1968)”에서 출발할 수 있다. 이 원리에 따라 두 수진기에서 동시에 기록한 신호음 상호상관 결과가 위상과 진폭 정보를 포함하고 있어 그린함수를 예측할 수 있다(Lobkis and Weaver, 2001; Shapiro and Campillo, 2004; Snieder, 2004; Wapenaar, 2004; Cheng et al., 2015). 수동 탄성파 탐사는 같은 영역 안에 있는 두 지점 수진기에 기록된 탄성파 신호음을 상호상관하여 그린함수를 구한다. 두 수진기에 기록된 탄성파 신호음을 그린함수와 음원함수로 나타내면
이다. 여기서, 은 음원함수, 는 수진기 에서 그린함수, 는 수진기 에서 그린함수이다. 두 수진기에 기록된 탄성파 신호음에 상호상관을 적용하면
이다. 상호상관 결과가 음원파형의 파워 스펙트럼 함수임을 알 수 있다. 가상음원으로 구하는 파동장은 음원모음에 대한 상호상관을 적용하고 적분하여 구할 수 있으므로
이 된다. 여기서, 는 수진기 에 기록된 탄성파 신호음을 음원으로 가정하고 수진기 에서 구한 그린함수이며, 는 음원 에 위치한 것으로 가정한 가상음원 그린함수이다(Fokkema and van den Berg, 1993).
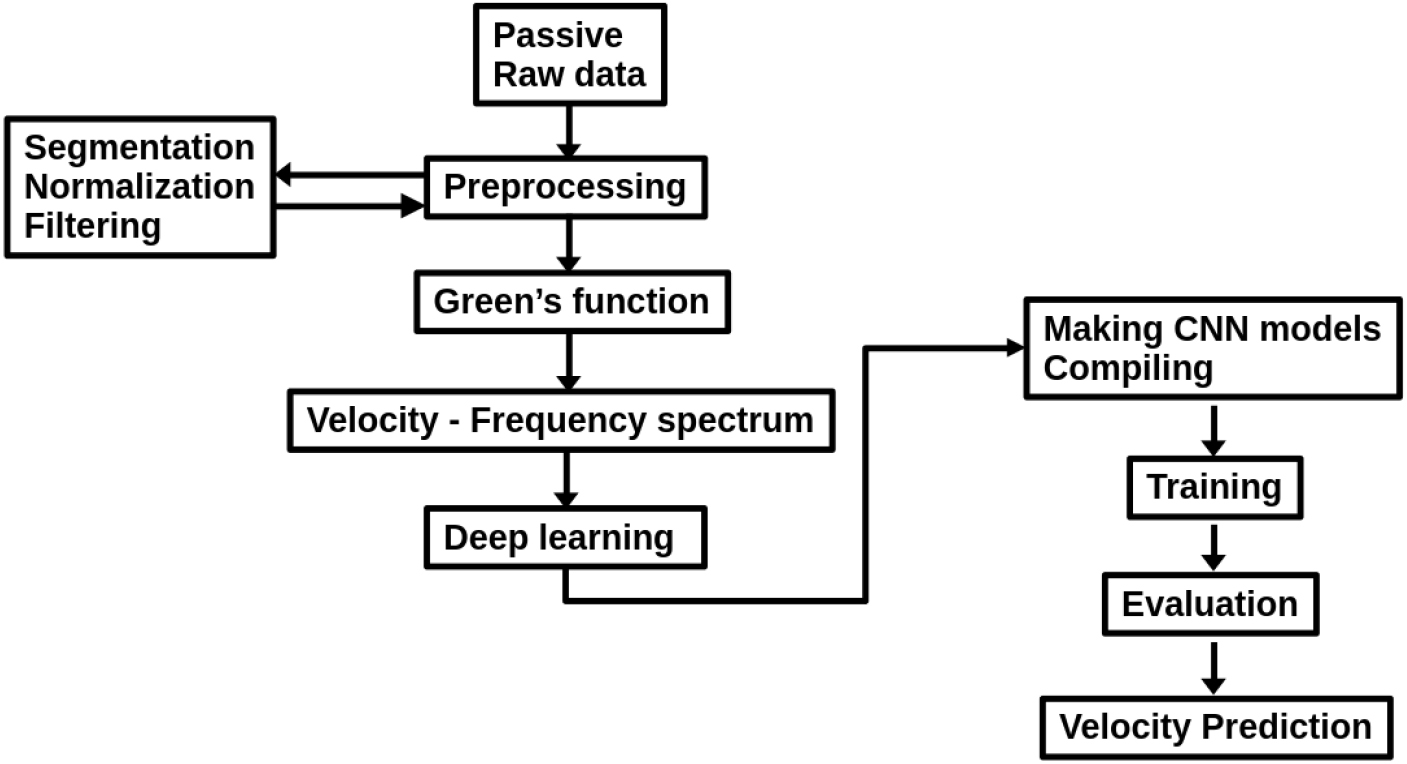
한편, 수동 탄성파 탐사에서는 그린함수로부터 속도-주파수 스펙트럼을 구하여 표면파 속도를 예측한다. 수동 탄성파 자료를 이용하여 표면파 위상속도를 구하는 일반적인 과정은 원시 탄성파 자료 주파수 분석, 가상음원 결정과 그린함수 구성, 주파수-위상속도 스펙트럼, 역산(깊이, 속도) 과정을 들 수 있다. 이 연구에서 제안하는 심층학습을 이용한 지하 속도변화 변화 예측은 수진기에 기록한 수동 탄성파 신호음에서 시간-주파수 스펙트럼 영상을 구하고 이 차이를 이용한다. 그 과정은 i)수동 탄성파 자료 확보, ii)그린함수 구하기, iii)시간-주파수 스펙트럼 영상 확보, iv)심층학습 이용 속도차이 확인이다(Fig. 5).
수동 탄성파 탐사를 사력댐 안정성 감시에 활용할 수 있는지 확인하기 위해 현장자료를 취득하였다. 수동 탄성파 현장자료는 사력댐 마루에 육상 노달 탄성파 탐사 시스템(Lee et al., 2016)을 이용하여 자료를 취득하였다. 10 Hz 육상 노달 수진기 73개를 5 m 간격으로 댐 마루에 설치하였다(Fig. 6). 자료기록은 1 ms 샘플링 간격으로 3 일간 동안 실시하였다. 자료취득 변수는 Table 2에 있다.
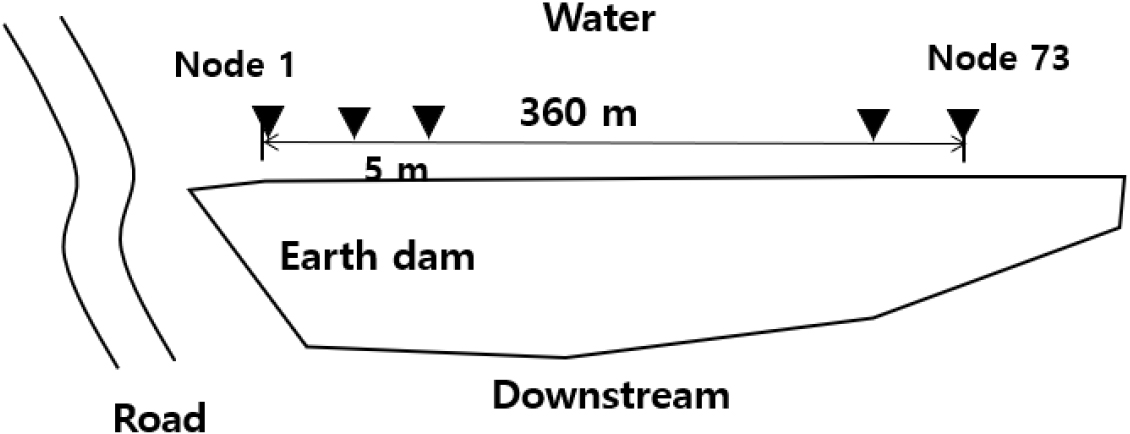
Table 2.
Field parameters for passive seismic data acquisition
| Items | Parameters |
| No. of nodes | 73 |
| Sampling interval | 1 ms |
| Node distance | 5 m |
| Sensor | 10 Hz geophone |
| Recording days | 3 days |
| Survey length | 360 m |
사력댐 주변에는 일반국도가 있어 차량이 자주 다닌다. 원시 수동 탄성파 자료는 다양한 음원 영향으로 탄성파가 기록된다. 이 가운데 차량진동 음원으로 신호가 기록되는 진폭이 높은 구간을 선정하여 표면파 속도를 구한다. 대표적인 수동 탄성파 자료 모음은 Fig. 7에 있다. 그림에서 (a)는 탄성파 모음자료 가운데 일부분으로 60 s 동안 기록이다. 붉은색 네모에 있는 강한 진폭은 인근 도로에서 차량이동으로 발생한 신호음 기록이다. (b)는 주파수 영역에서 나타낸 것이다. 수진기에 기록된 신호음은 주로 1–60 Hz, 100–200 Hz 에 집중되어 있다. 차량진동 음원으로 기록되는 표면파는 10 Hz 전후로 발생하는 발생하므로 5–10–50–60 Hz 대역통과(band-pass) 필터를 적용하고 RMS (root mean square) 진폭 정규화를 적용하는 전처리를 수행한다. 수동 탄성파 모음자료에는 다양한 음원 영향으로 탄성파 신호가 기록된다. 이 가운데 특별히 강한 진폭이 기록된 부분 추출, 가상음원 설정, 그리고 상호상관을 적용하여 그린함수를 구한다. 모든 그린함수를 중합하여 속도-주파수 스펙트럼으로 나타내는 분산곡선을 구한다(Fig. 8).
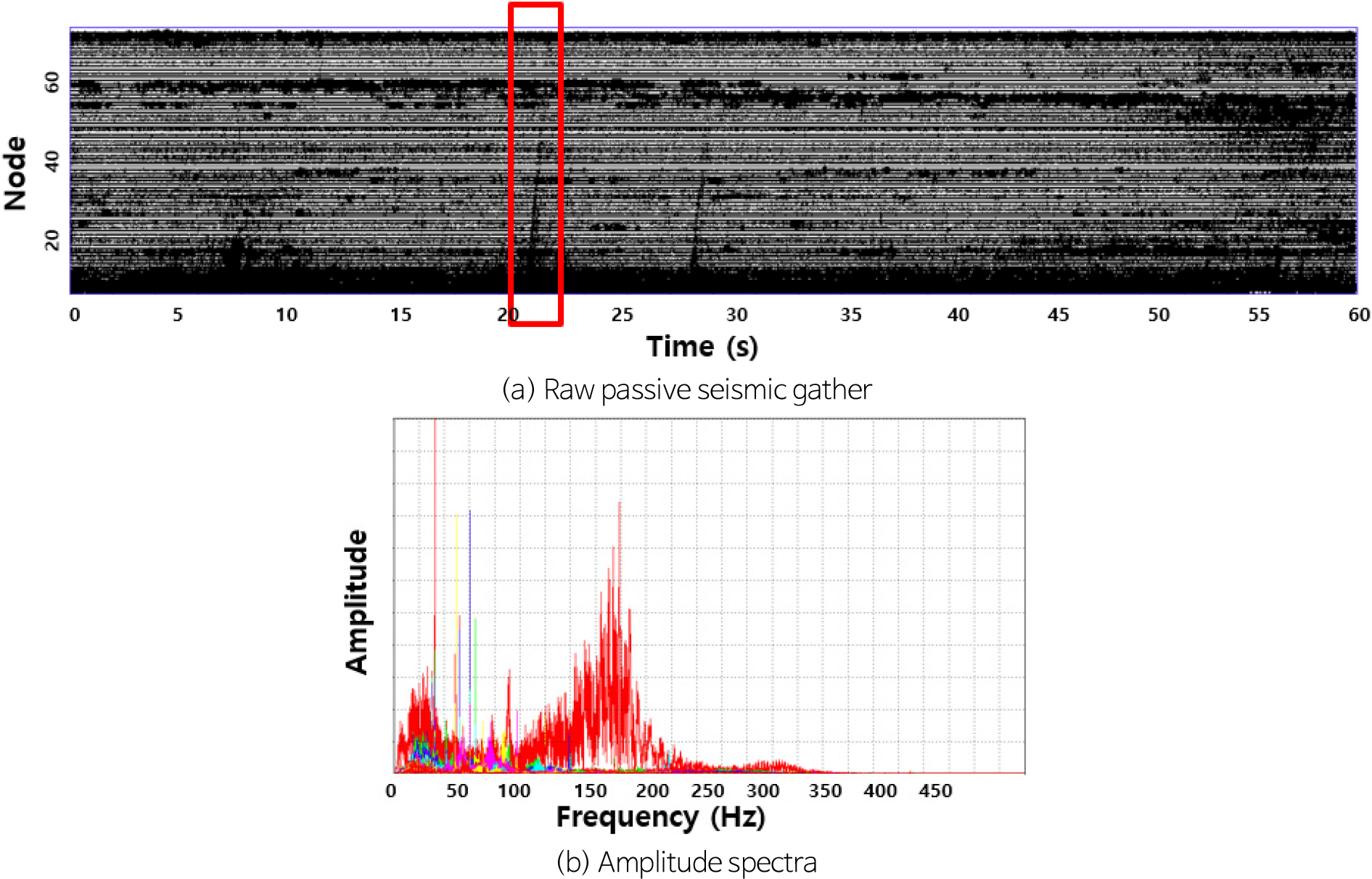
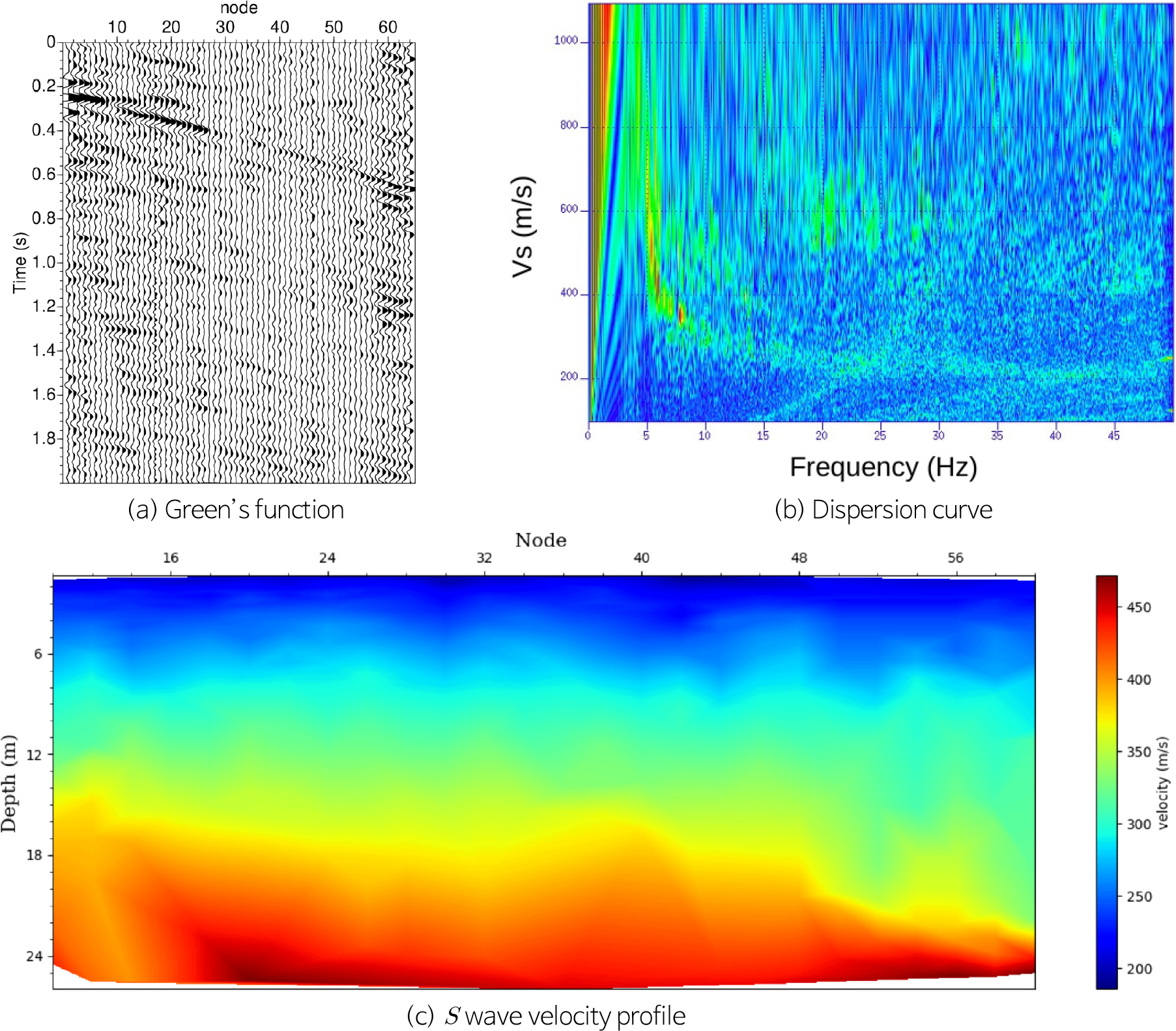
Fig. 8a는 노드별로 가상음원을 선정하고 가상음원 노드로부터 오른쪽 방향에 있는 모든 노드에 기록한 신호음을 상호상관하고 중합한 결과이다. Fig. 8b는 그린함수에 대한 분산곡선으로 속도-주파수 스펙트럼이다. 그림에서 보듯이 전형적인 표면파 분산곡선 형태이다. Fig. 6에서와 같이 차량진동 방향에서 진행한 평면파를 고려하여 가상음원은 노드 1에서 노드 2, 노드 3, 그리고 노드 66 까지 순차적으로 선정하고 상호상관을 적용한다. 노드 1을 가상음원으로 설정하면 노드 2에서 노드 73까지 72개 트레이스에 상호상관을 하게 된다. 노드 65번을 마지막 가상음원으로 설정 할 경우 상호상관은 노드 66에서 노드 73까지 8개 트레이스에 적용한다. 각 노드에서 그린함수가 결정되면 속도-주파수 스펙트럼으로 변환하여 표면파 속도를 구한다. 여기에서는 잡음이 심하게 기록된 노드 1번에서 5번 그리고 노드 71번에서 73번을 제외하여 노드 6번에서 70번까지 기록을 적용한다. 노드별 가상음원에서 구한 표면파 속도를 내삽하면 파 위상속도 단면도를 구할 수 있다(Fig. 8c). 그림의 왼쪽에서 오른쪽으로 파 위상속도가 증가하고 있고 일부 저속도층이 있는 것을 짐작할 수 있다. 탄성파 코다파 신호음에서 상대적인 속도차이 예측은 주로 이중화(doublet) 방법(Poupinet et al., 1984; Clarke et al., 2011; Lecocq et al., 2014) 또는 늘리기(stretching) 방법(Daskalakis et al., 2016)을 이용한다. 늘리기 방법은 탄성파 속도변화가 심한 경우에 적용한다. 코다파 상호상관 함수에서는 주기놓침 현상때문에 탄성파 속도가 낮게 결정되는 경우가 있어 물성변화가 적은 곳에서는 이중화 방법을 적용한다.
이 연구에서는 댐 내부에서 누수가 예상되는 구간과 그 외 구간에서 그린함수에 대한 시간-주파수 스펙트럼 영상을 비교하여 댐체 내부 물성에 따라 달라지는 속도 차이 여부를 확인하고자 한다. 댐체 내부 누수가 없는 안정 구간에 해당하는 10번째 노드에서 그린함수는 10번째 노드에서 신호음을 가상음원으로 설정하여 구한다. 댐체 내부 누수가 예상되는 60번째 노드에서 그린함수는 60번째 노드에서 신호음을 가상음원으로 설정하여 구한다. 이때 시간-주파수 스펙트럼은 Fig. 9에 있다. 그림에서 보듯이 Fig. 9a는 노드 10에서 그린함수 함수와 시간-주파수 스펙트럼이다. Fig. 9b는 노드 60에서 그린함수 함수와 시간-주파수 스펙트럼이다. 각 노드에서 속도를 예측하기 위해 시간-주파수 스펙트럼 영상을 CNN 알고리즘을 이용하는 심층학습에 적용한다. 정확도 함수와 손실함수 결과는 Fig. 9c에 있다. 노드 10에서 예측 속도 정확도는 74.71%인 385 m/s, 노드 60에서 예측 속도는 정확도는 98.86%인 365 m/s이다. 이때 학습자료 및 검증자료 정확도는 0.9에 수렴하고, 학습자료에 대한 손실함수는 0.3, 검증자료에 대한 손실함수는 0.6에 수렴하다 조금씩 증가하는 것을 알 수 있다.
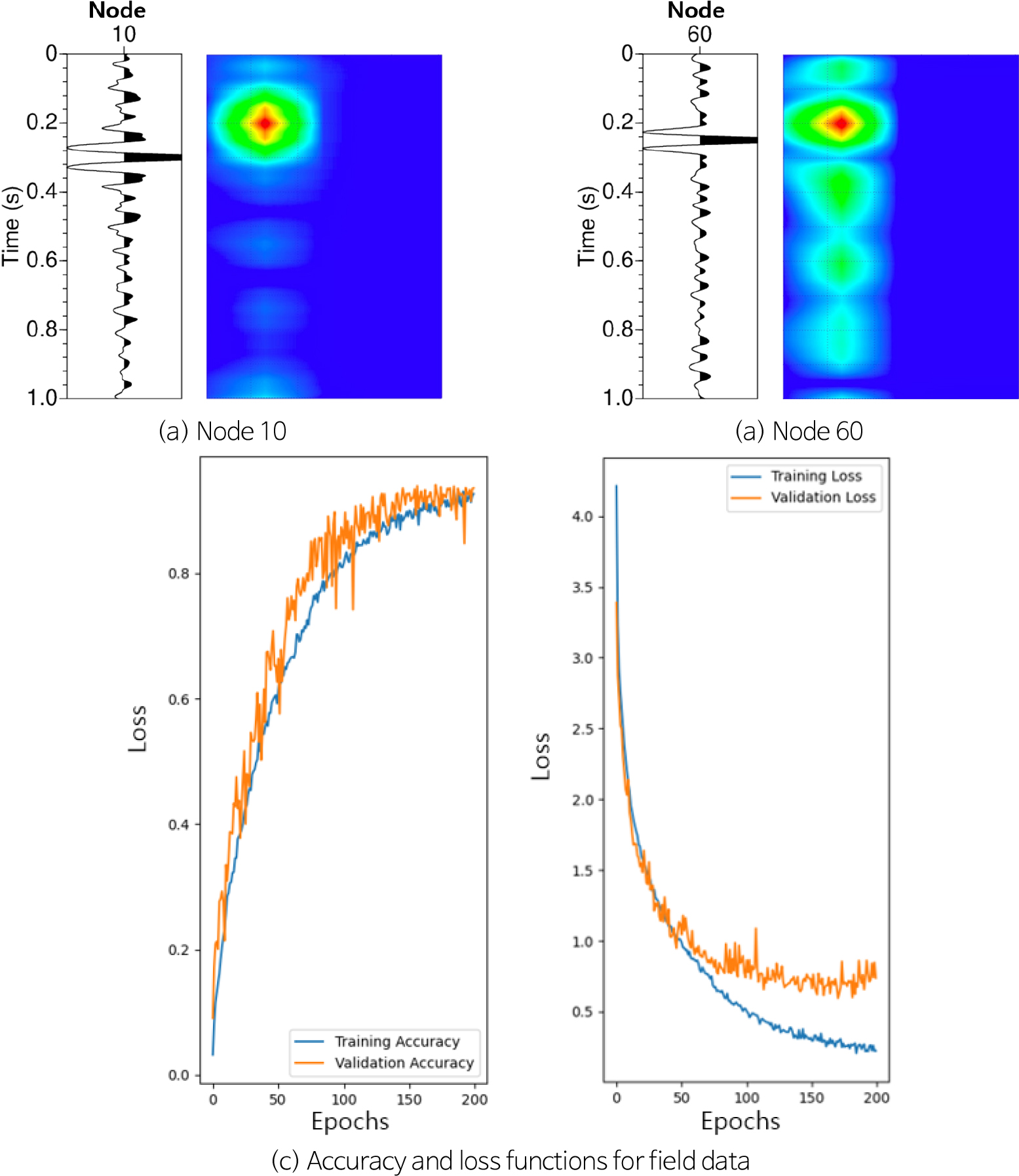
이 연구에서 심층학습을 이용하여 속도를 예측하는 것은 속도에 해당하는 시간-주파수 스펙트럼과 가장 유사한 영상을 찾아가는 과정으로 간접적으로 속도를 추정하는 방식이다. 과대적합을 방지하기 위해 자료 증강(data augmentation)을 적용하지만 손실함수가 더욱 증가하여 여기에서는 적용하지 않았다. 이때 적용한 학습자료는 능동 MASW 결과를 중심으로 댐체 내부구조와 속도를 추정하고 수치 모형실험을 이용하여 준비한 것이다. 차량 진동으로 각 노드에 기록된 부분을 특정하여 그린함수를 구하고 이에 대한 시간-주파수 스펙트럼으로 변환하여 CNN 심층학습에 필요한 영상자료를 확보하였다. 수치 모형실험으로 확보한 학습자료는 현장자료 적용할 때 과대적합이 발생하고 있어 이를 줄이기 위해서는 현장조건에 적합한 학습자료가 필수적임을 알 수 있다.
노드 60에서 탄성파 속도가 노드 10에서 보다 예측값이 낮아 노드 60에서 물성 변화가 있음을 짐작할 수 있다. 댐체 내부에 누수가 없다면 일정한 속도 결과를 예상할 수 있다. 누수가 있는 경우라면 여기에서 살펴본 것처럼 공극수압이 증가하고 밀도도 증가하여 탄성파 속도가 작아진다고 할 수 있다. 여기에서 사용한 학습 및 검증자료는 수치모형실험에서 사용한 것과 동일한 것이므로 오차가 있을 수 있다. 정확한 현장 속도를 적용하여 학습 및 검증자료를 확보한다면 속도변화 예측 신뢰도를 높일 수 있을 것으로 생각한다.
연구 지역에서는 능동 다중채널 표면파 탐사(multi-channel analysis of surface waves, MASW)도 진행하였고, 그 결과를 비교하고자 한다. Fig. 10에는 MASW 탐사와 수동 탄성파 탐사로 구한 단면도이다. 상부 속도 단면도는 MASW 결과이고 아래 속도 단면도는 수동 탄성파 탐사 결과이다. 그림에서 보듯이 오른쪽으로 속도가 증가하는 경향을 보이면서 저속도층이 있음을 알 수 있다. MASW 속도 단면도 오른쪽 상부 붉은색 원으로 표시한 부분에 속도 차이에 따라 댐체 내부 이상대가 있음을 짐작할 수 있지만 수동 탄성파 탐사로 구한 속도 단면도의 경우 정확한 차이를 판단하기는 어렵다. 분산곡선으로부터 파 속도를 구하는 것은 주관적 판단을 포함하고 있어 속도 단면도는 어느 정도 상대적일 수 밖에 없다. 한편, 수동 탄성파 자료를 심층학습을 이용하여 예측한 속도는 학습자료에 영향을 받으므로 현장에 적합한 속도모델을 준비하고 시간-주파수 스펙트럼 영상을 충분히 확보한다면 수동 탄성파 탐사를 이용한 사력댐 안정성 감시에도 활용할 수 있을 것으로 본다. 그리고 모든 노드에서 그린함수를 구하고 시간-주파수 스펙트럼을 확보하여 속도를 예측하여 그 변화를 살펴보면 좀 더 정확한 누수 구간을 확인할 수 있을 것으로 본다.
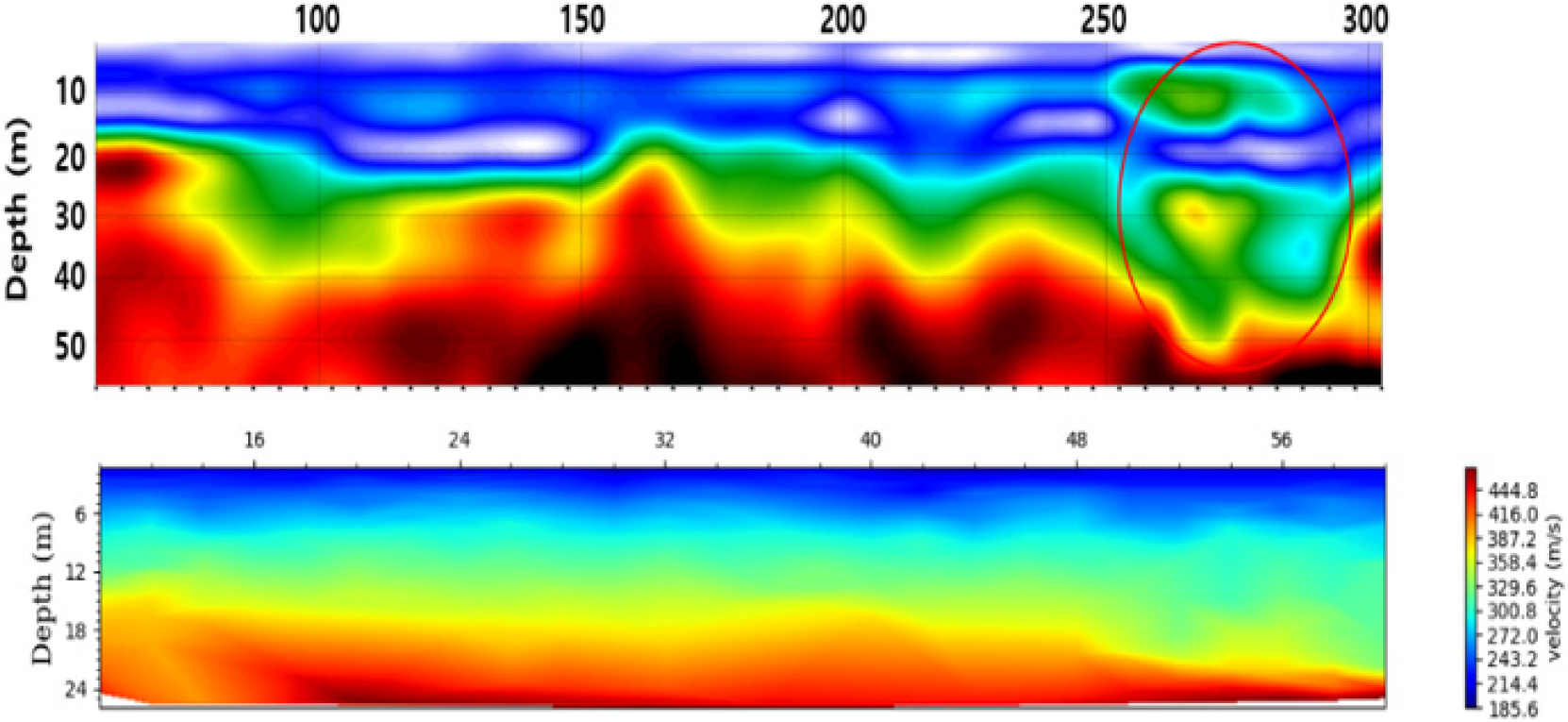
Fig. 10.
Comparative results of an active MASW survey (top) and a passive seismic data survey (bottom). The red circle in the top image indicates the weak zone resulting from internal erosion caused by water infiltration in the earthen dam. Please note that the depth scale of the passive seismic velocity model is half that of the active MASW survey. Node 55 in the bottom image relates to the suspected weak areas (Jang et al., 2024).
결 론
이 연구에서는 수동 탄성파 자료를 사력댐 안정성 감시에 적용할 수 있는지 살펴보았다. 수치모형 실험에서 다양한 속도모델에 대한 시간-주파수 스펙트럼 영상을 만들고 심층학습을 이용하여 속도를 예측하였다. CNN을 적용한 심층학습 결과는 정확도는 “1”그리고 손실함수는 “0”에 수렴하고 예측 속도도 99% 정도 일치하였다. 현장자료 적용에 필요한 수동 탄성파 현장자료는 사력댐 마루에서 5 m 간격으로 육상 노달 수진기 73개를 이용하여 취득하였다. 댐 내부 누수가 예상되는 구간인 노드 60번과 안정 구간으로 여길 수 있는 노드 10번에서 그린함수를 구하였다. 그린함수에 대한 시간-주파수 스펙트럼 영상을 심층학습에 적용한 결과는 노드 10번에서 예측 속도가 385 m/s, 노드 60번에서 예측 속도가 365 m/s이다. 누수가 없는 경우에는 일정한 탄성파 속도 값이 일정해야 한다. 누수가 있는 경우 수포화도와 공급압이 증가하고 밀도가 커져 파 속도가 작아지므로 예측 파 속도가 작은 곳에서 누수 발생 가능성을 예상할 수 있다.
현장자료 적용할 때 수치 모형실험으로 구한 학습자료를 일반화 하여 이용하여 차이가 있을 수 있다. 향후 좀 더 다양하고 구체적인 물성(파, 파, 밀도)에 대한 시간-주파수 스펙트럼 영상 그리고 현장 내부 구조를 반영한 시간-주파수 스펙트럼 영상을 충분히 확보한다면 수동 탄성파 탐사를 이용하여 사력댐 안정성 감시 활용에 일정 부분 기여 할 수 있을 것으로 생각한다.
