

서 론
암반사면에 대한 지질공학적 문제를 해결하기 위하여, 접근이 불가능한 구간에 대한 암반의 3차원 기하특성과 구조를 재구성하는 것은 일반적인 사항이다. 암반사면의 전반적인 역학적 거동은 지질구조 및 불연속면에 의해 달라지므로 암반의 기하학적 및 역학적 특성에 대한 정확한 조사가 특히 중요하다.
현장에서 수행되는 전통적인 지질공학적 조사방법으로는 1차원적인 스캔라인(scanline) 방법과 2차원적인 윈도우(window) 방법이 있으며, 암반사면에 직접 접근하여 필요한 정보를 수집하는 방법이 있다(Priest, 1993). 암반에 대한 지질공학적 특성을 분석하는 경우 역학적 특성의 정량화와 불안정성 평가를 위하여 특별한 접근법이 요구된다. 이를 위해 국제암반역학회(International Society for Rock Mechanics, ISRM)에서 제시한 암반의 불연속면 조사항목에 대한 자료조사 및 평가가 필요하다. 국제암반역학회(ISRM)에서는 암반의 불연속면에 대한 정량적인 평가를 위하여 10개의 매개변수를 선정하였다. 선정된 10개의 매개변수는 방향(orientation), 간격(spacing), 연장(persistence), 거칠기(roughness), 벽면 강도(wall strength), 간극(aperture), 충전(filling), 누수(seepage), 불연속면 군의 수(number of sets) 및 암반블록 크기(block size)가 있다(Ulusay and Hudson, 2007).
실용성과 안정성의 이유로 전통적인 지질공학적 조사방법의 경우 제한된 구간에서만 수행되거나, 암반사면의 전체적인 안정성 평가를 위한 자료를 제공하지 못한다(Gigli and Casagli, 2011). 최근 대규모 터널, 사면 등의 설계 및 시공시 대량의 데이터 수집이 요구되는 경우가 있다. 이러한 경우 암반 특성에 대한 대량의 데이터 수집은 매우 시간이 오래 걸리고, 작업자의 안전성, 측정자의 전문성 및 신뢰성 등의 문제가 발생될 수 있다(Lee and Jeon, 2016).
이러한 문제점을 최소화하기 위하여 최근에는 Digital photogrammetry(Chandler, 1999; Lane et al., 2000), Laser scanning(Terrestrial and Aerial)(Kraus and Pfeifer, 1998; Gigli et al., 2009) 및 SAR interferometry(Ferretti et al., 1999)와 같은 원격 및 고해상도 조사 기술이 개발 및 활용되고 있다. 그리고 컴퓨터의 계산 성능 향상으로 인하여 비교적 짧은 시간에 많은 양의 데이터를 처리할 수 있게 되었다. 지질공학적 특성 분석을 위하여 활용되는 원격 및 고해상도 조사 기술의 장점은 대규모(Oppikofer et al., 2008, 2009) 및 소규모(Abellan et al., 2006; Lombardi et al., 2006) 구간에 대한 분석이 모두 가능하고 암반의 불연속면에 대한 정보를 신속하게 얻을 수 있다는 것이다. 여기서 제시된 대규모의 범위는 수백만 m3 구간에 해당하며, 소규모의 범위는 수천에서 수만 m3 구간에 해당한다.
최근 광학기술의 발달로 인하여 빠르고 정확한 3차원 포인트 클라우드 정보의 획득이 가능한 LiDAR(light detection and ranging)의 활용이 급격하게 증가하고 있다. LiDAR 활용 기술은 노출된 암반의 표면을 스캔하여 얻어진 포인트 클라우드(point cloud)으로부터 면정보(plane information)들을 추출하는 것을 기반으로 한다. 1990년대부터 LiDAR 장비들이 실용화되기 시작했으며, 현재에는 암반 표면에 대한 정보를 효과적으로 얻어낼 수 있는 정밀성과 정확성을 확보하고 있다. 그리고 현장에서 활용이 용이하도록 경량화와 보급화가 이루어진 상황이다(Lichti et al., 2002).
본 연구에서는 지상 LiDAR 자료에 대한 3차원 반자동 추출기법을 이용하여 설악산국립공원 천불동 계곡에서 위치한 귀면암 일대의 암반사면을 대상으로 안정성 평가를 수행하였다. 귀면암 일대를 대상으로 지상 LiDAR를 이용하여 암반 표면의 불연속면을 촬영하였다. 촬영된 자료를 이용하여 3차원 공간 포인트 클라우드(point clouds)를 형성하고 국제암반역학회(ISRM)에서 제시한 매개변수를 반자동으로 추출하였다. 추출한 매개변수 항목을 토대로 귀면암 일대 암반을 대상으로 3차원 운동학적 해석을 수행하고 부분별 안정성을 평가하고자 한다.
반자동 지상 LiDAR 분석기법
지상 LiDAR 자료 분석은 일반적으로 106 수준의 많은 측정점에 대해 기하벡터 분석을 수행하므로 매우 복잡한 작업이다. 이러한 대량의 데이터를 효율적을 처리하기 위해서는 특별한 알고리즘, 시스템, 프로그램 등이 필요하다. 정확한 3차원 해석을 위해서는 먼저 현장에서 지상 LiDAR 시스템의 설치위치 선정, 암반사면 전체의 표면 측정, 복합적인 기하 요소 측정, 음영지역과 식생 피복 등에 대한 세심한 주의가 필요하다. 이러한 요소들에 대해 주의하더라도 지상 LiDAR를 촬영하는 과정에는 항상 오차와 자료 결측이 존재할 수 있다. 특히 상향 경사의 돌출부에 의한 음영지역과 식생분포지역의 경우 측정이 매우 어렵다. 일반적으로 식생은 반복적인 복합 펄스(multiple-pulse)를 이용한 지상 LiDAR 촬영 및 프로그램 처리 등에 의하여 부분적인 필터링을 할 수 있는 것으로 알려져 있다. 그러나 필터링을 통해 획득하는 최종 결과는 0.5~1 m의 해상도를 갖는 3차원 모델을 생성할 수 있을 정도로서, 이 수준의 해상도로 생성된 모델은 다차원 접근방법에 따른 지질공학적 특성분석에 적합하지 않다.
현장에서 측정한 자료는 1단계에서 필터링을 실시한 후 데이터가 없는 지역은 제외시킨다. 2단계에서 특정한 공통좌표체계를 따라 모든 단일 스캔 자료를 추출하여 가능한한 완벽한 3차원 공간 포인트 클라우드를 형성한다. 3차원 운동학적 지상 LiDAR 자료 해석기법의 경우 기본적으로 울퉁불퉁한 형태의 불규칙한 암반 표면에서 동일한 불연속면에 속하는 점 군집(point cluster)을 추출할 수 있고, 이 군집들을 암반 내 불연속면 군(set)으로 정의하고 정량화 시키는데 활용한다. 포인트 클라우드 내 수백만 개의 점들 중에서 점 군집에 대한 추출은 DiAna3D로 불리는 Matlab 도구를 이용하여 수행한다(Gigli and Casagli, 2011).
대규모 포인트 클라우드의 3D 반자동 분석을 통한 암반의 지질공학적 특성 추출을 위하여, 포인트 클라우드 내에 샘플링 큐브(sampling cube)를 이동시키며 추출한 점 군집에 대해 최소제곱법에 의한 최적의 평면(best fitting plane)을 정의하는 방법을 활용하였다. Fig. 1은 고해상도 포인트 클라우드 상에서 샘플링 큐브의 선정과 최적의 평면을 나타낸 것이다. 그림에서 붉은색 큐브는 1 m 급 크기를 나타낸 것이다. 그러나 샘플링 큐브의 크기는 불연속면을 따라 이동하면서 0.1~2 m 범위 내에서 결정하게 된다.
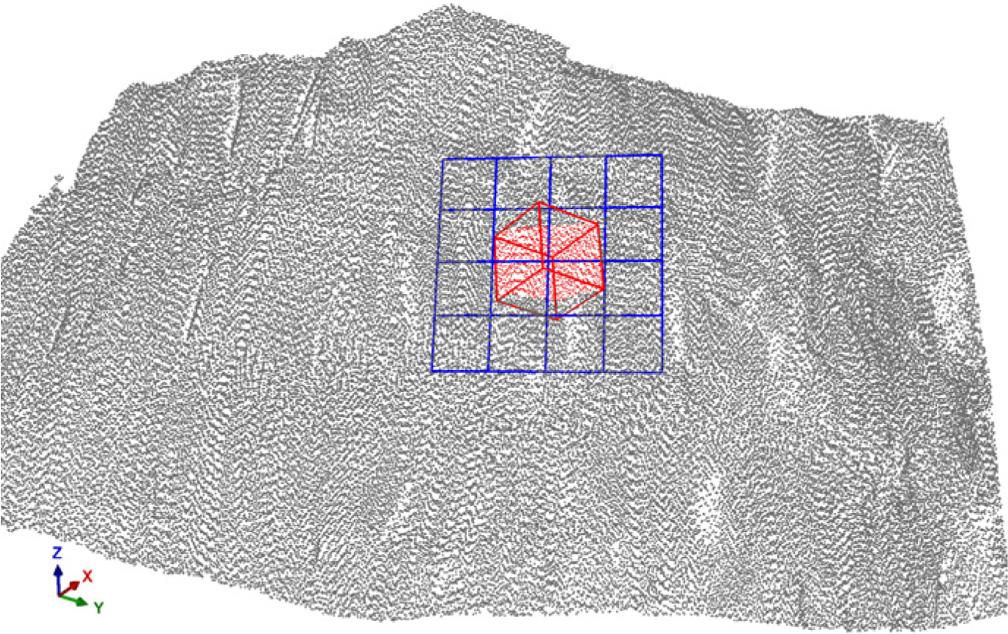
Fig. 1.
Cubic selection (red points) and best fitting plane (blue grid) on a high-resolution point cloud (Gigli and Casagli, 2011).
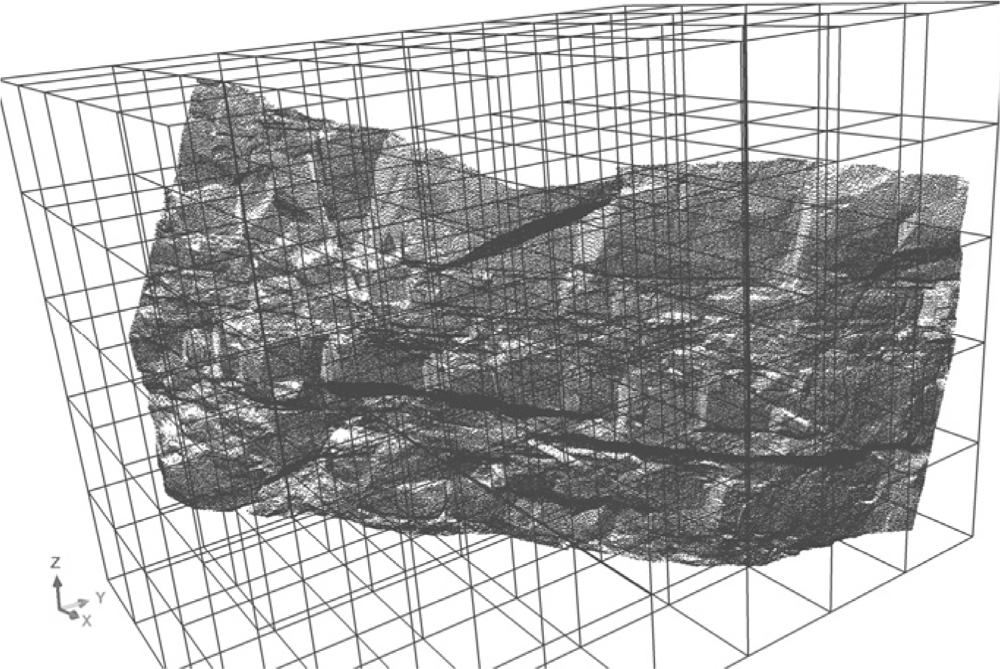
촬영된 전체 포인트 클라우드를 대상으로 적용하기 위하여 큐브는 규칙적인 패턴으로 지형적인 축을 따라 이동하거나(상자 해석), 포인트 클라우드의 각 단일 지점을 중심으로 정렬할 수 있다(차분 해석). Fig. 2는 큐브를 활용한 상자 해석의 예를 나타낸 것으로 각 큐브에 포함된 하위 포인트 클라우드들은 최적의 평면을 정의하기 위하여 활용된다. 그림에서 참고용 단위 큐브의 크기는 2 m를 적용하였다. 이러한 자동화된 방법을 통해 평면상의 점들을 분리시키고 클리노 콤파스를 이용하여 불연속면을 측정하는 것처럼 표면의 방향을 결정하게 된다. 이 방법의 장점은 수백만 개의 촬영된 점을 대상으로 적용이 가능하고 현장에서 접근이 불가능한 위치에 대해서도 측정이 가능하다는 것이다.
암반에 존재하는 주요 불연속면을 정의하기 위하여 모든 적정한 포인트 클라우드를 추출하고 평사투영망에 도시한다. 유사한 방향성을 갖는 면은 수동으로 병합한 다음 활동 가능성이 높은 후보 불연속면 군을 선정하게 된다. Fig. 3은 평사투영해석을 통한 불연속면 군을 정의한 사례이다. 그림에서 불연속면 군의 색깔은 평사투영망의 주요 불연속면에 의한 파괴형태와 일치시키기 위하여 동일하게 나타내었다.
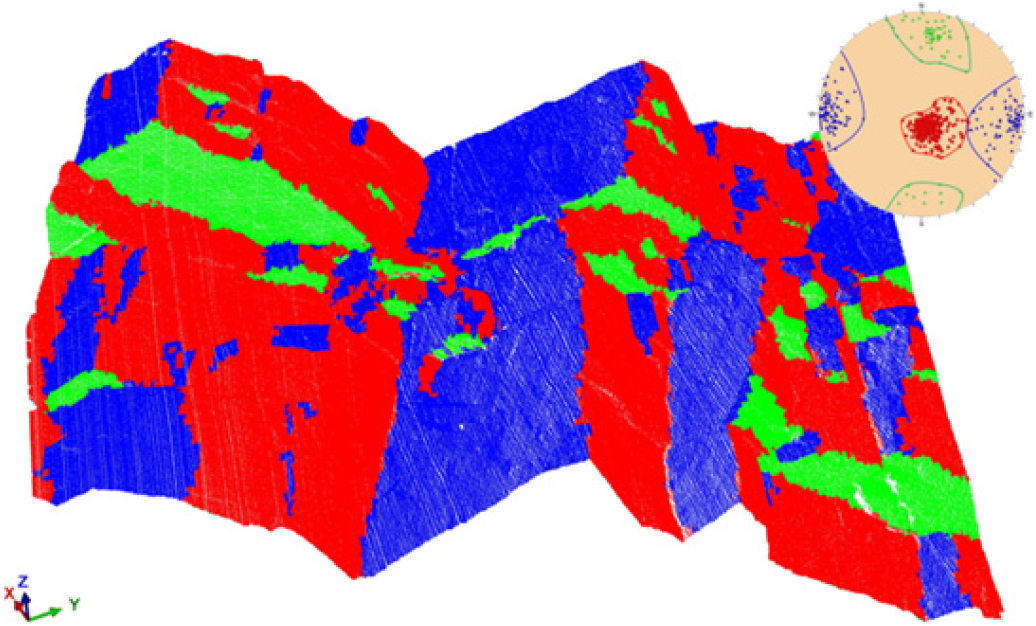
Fig. 3.
Example of the assignment of discontinuity sets after stereographic analysis (modified from Gigli and Casagli, 2011).
큐브의 크기와 표준편차의 임계값을 선택함으로써 매우 불규칙한 블록 형태의 암반 표면을 조사하는게 가능하게 되었다. 이 방법의 장점은 암반 표면에 직접 접근하지 않고도 중요한 지질공학적 매개변수를 조사할 수 있으며, 국제암반역학회(ISRM)에서 제시한 매개변수 가운데 방향(orientation), 간격(spacing), 연장(persistence), 규모 의존적 거칠기(roughness), 불연속면 군의 수(number of sets) 및 암반블록 크기(block size)를 반자동으로 추출할 수 있다(Gigli and Casagli, 2011).
3차원 운동학적 해석
암반사면에서 서로 다른 불연속면에 속하는 군집을 조사하여 분류하면 절리와 층리의 기하학적 양상을 결정할 수 있게 된다. 지상 LiDAR를 통하여 촬영된 포인트 클라우드를 이용하여 암반사면의 매우 정확한 3차원 모델을 제공할 수 있다.
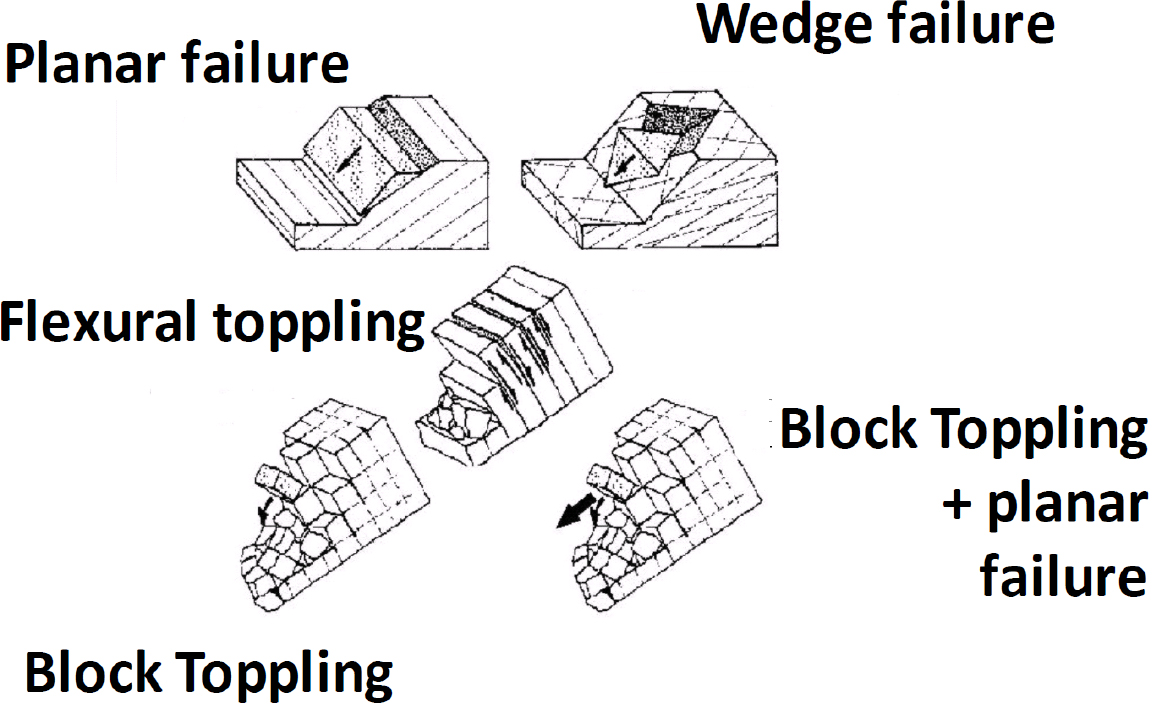
서로 다른 불연속면의 포인트 클라우드에 대한 경사 및 경사방향을 암반사면의 지형조건과 비교함으로써 기하학적 조건에 부합하는 파괴 메카니즘을 정의할 수 있다. Fig. 4는 서로 다른 운동학적 조건에서 발생될 수 있는 암반사면의 주요 파괴 메카니즘을 나타낸 것이다. 그림에서 보는 바와 같이 암반사면의 주요 파괴 메커니즘을 살펴보면 평면파괴(planar failure), 쐐기파괴(wedge failure), 휨전도(flexural toppling), 블록전도(block toppling), 자유낙석(free fall) 등으로 분류할 수 있다.
각각의 파괴 메커니즘에 대하여 촬영된 포인트 클라우드로부터 정의된 불연속면의 극점(pole) 및 대원(plane)과 사면 방향과의 교차점을 비교하고, 암반의 강도에 대한 기본적 자료를 활용하여 파괴기준을 정의할 수 있다.
암반사면의 기하학적 양상(일반적으로 촬영된 포인트 클라우드의 모든 점을 이용한 3차원 지형모델)과 다른 불연속면 포인트 클라우드의 기하학적 양상(경사, 경사방향, 간격)을 함께 고려하고, 식 (1)에서 식 (5)에서와 같이 정의된 운동학적 지수를 참고하여 서로 다른 파괴 메커니즘의 적합도를 정량적으로 정의할 수 있다(Gigli et al., 2022).
여기서, 는 특정 파괴형태에 대한 취약성(susceptibility), 은 전체 파괴기준을 만족하는 극점의 수, 및 아래첨자는 특정 파괴기준을 만족하는 극점의 수, 는 전체 파괴기준을 만족하는 교차점의 수, 및 아래첨자는 특정 파괴기준을 만족하는 교차점의 수를 나타낸 것이다.
본 연구에서는 불연속면의 해석이 가능한 Matlab 도구인 DiAna3D 프로그램을 활용하였으며, 이는 지상 LiDAR로부터 촬영된 고해상도의 포인트 클라우드에서 암반사면의 정보를 3차원 반자동으로 추출이 가능하다(Gigli and Casagli, 2011).
운동학적 지수는 DiAna3D 프로그램을 이용하여 사전에 작업한 구조화된 포인트 클라우드를 통해 계산할 수 있고, 파괴 메커니즘에 대한 상대확률을 설명하기 위하여 3차원의 암반사면에 대한 지형모델 위에 이를 나타낼 수 있다. 모든 운동학적 지수를 함께 나타냄으로써 암반사면 내 특정부분에 대하여 가능한 파괴유형을 선정할 수 있으며, 전체적인 운동학적 지수 도면을 작성할 수 있다. 따라서 운동학적 지수 도면은 전체 암반사면에서 예상되는 파괴에 대한 공간적인 분포를 제공한다. 또한, 대상사면의 특성을 더 잘 나타내기 위하여 암반사면의 방향과 사면경사를 표현할 수 있다(Gigli et al., 2022).
연구지역
지상 LiDAR
본 연구에서 사용된 지상 LiDAR 촬영 장비는 포인트 정확도가 2.2 mm인 미국 Trimble 사의 TX5장비이다. 이 장비는 수평 360°, 수직 300°의 촬영 범위를 가지고 있으며, 최대 스캔거리는 120 m이다. Table 1은 본 연구에 사용된 지상 LiDAR 장비의 사양을 나타낸 것이다(Song et al., 2019).
Table 1.
Specification of Terrestrial LiDAR equipment (Song et al., 2019)
대상지역 및 낙석 발생 이력
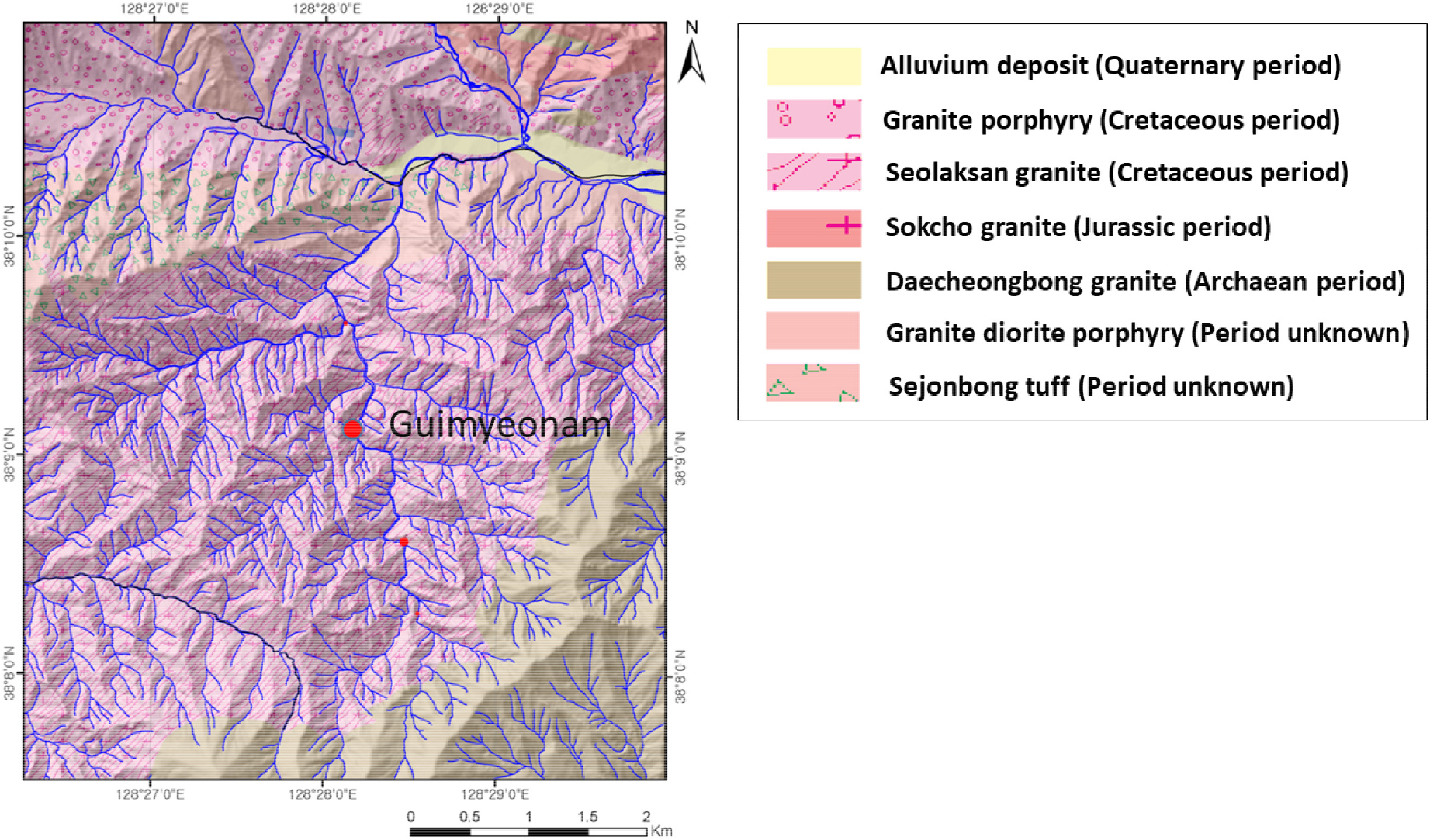
지상 LiDAR를 이용한 암반사면 안정성 평가를 위하여 선정한 대상지역은 설악산국립공원 내에 위치한 귀면암 암반사면이다. 귀면암의 위치에 대한 좌표는 북위 38° 09' 4.95", 동경 128° 28' 12.57"이다. Fig. 5는 본 연구의 대상지역인 귀면암 암반사면 주변에 대한 지질도를 나타낸 것이다. 그림에서 보는 바와 같이 귀면암 암반사면은 백악기 화강암으로 구성되어 있다.
국립공원공단에서 제공한 자료를 토대로 2007년부터 2016년까지 10년 동안 설악선 천불동 계곡에 위치한 귀면암에서의 낙석 발생 이력을 조사하였다. Table 2는 천불동 계곡 내에 위치한 귀면암 주변에서의 낙석 발생 이력을 정리한 것이다. 표에서 보는 바와 같이 조사기간 동안 귀면암 주변에서 6건의 낙석이 지속적으로 발생되었으며, 낙석의 규모도 다양하며 최대 2.5 ton의 대규모 낙석도 발생된 것으로 나타났다. 그리고 낙석은 주로 해빙기에 발생되었으나 여름철에도 발생된 사례가 있는 것으로 조사되었다.
Table 2.
Rockfall history around Guimyeonam
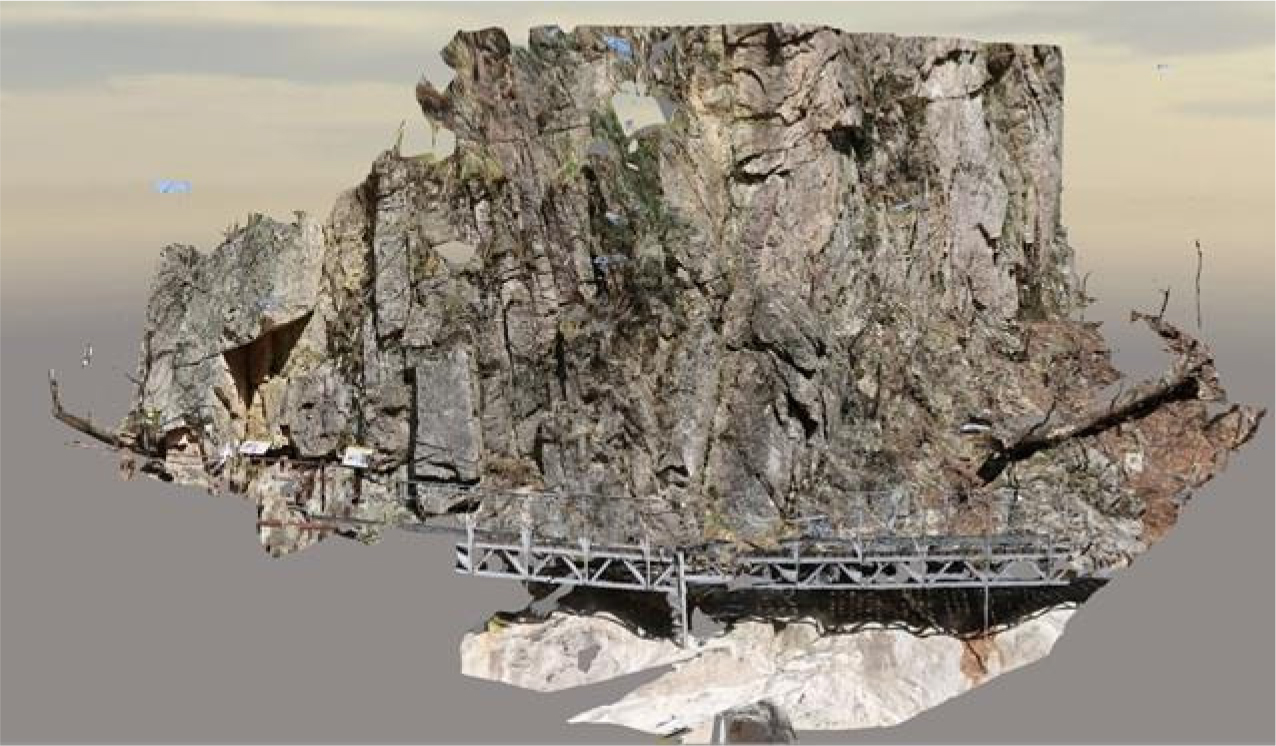
대상지역인 귀면암 암반사면을 대상으로 지상 LiDAR를 이용한 촬영을 수행하였으며, 이를 통하여 획득한 자료는 오차와 식생을 필터링하여 포인트 클라우드를 형성할 수 있도록 처리하였다. Fig. 6은 대상지역인 귀면암 암반사면을 대상으로 지상 LiDAR로 촬영하고 필터링한 포인트 클라우드를 나타낸 것이다.
불연속면 분석 결과
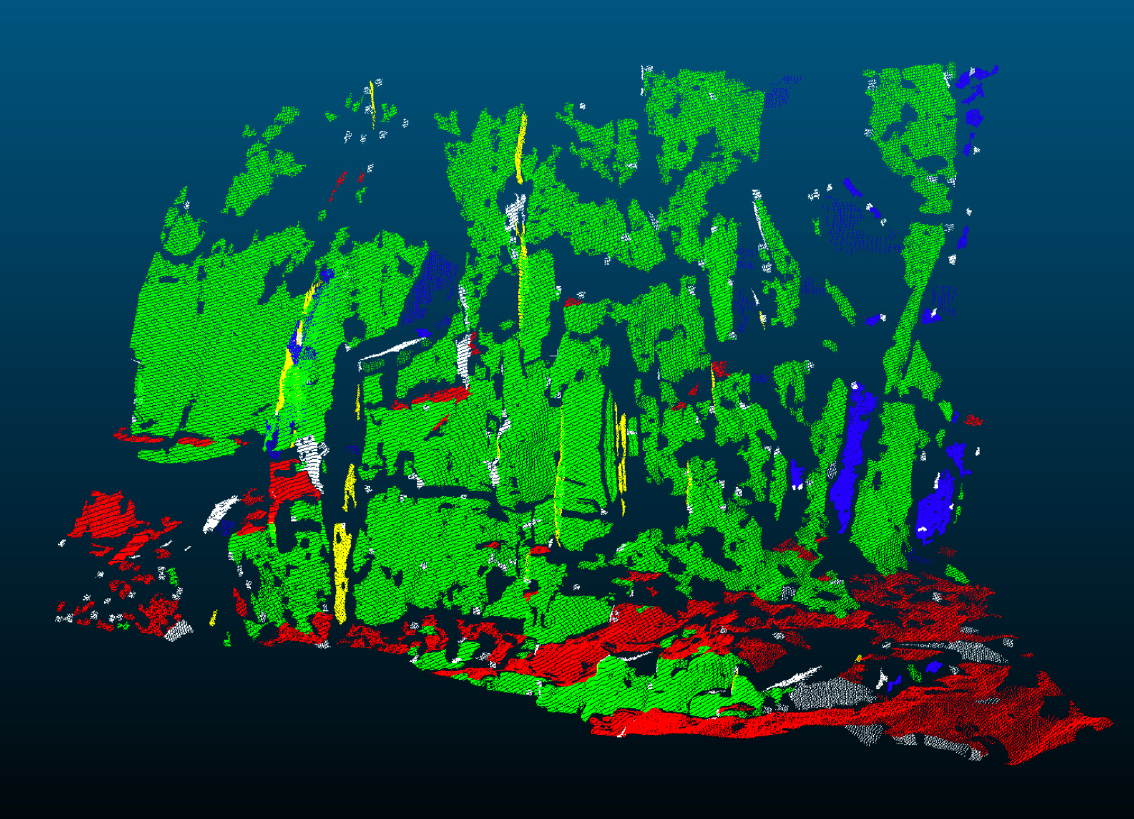
귀면암 암반사면의 포인트 클라우드는 약 340,000개로 구성되어 있으며, 분석된 포인트 클라우드의 영역은 폭 22.4 m, 높이 13.6 m, 깊이 13.7 m에 해당한다. 해당 영역에 대하여 샘플링 큐브를 이동시키며 반자동 지질공학적 매개변수를 조사하였다. 샘플링 큐브의 크기는 불연속면을 따라 이동하면서 0.1~2 m 범위 내에서 결정하였다. 그리고 DiAna3D 프로그램을 이용하여 불연속면에 대한 분석을 수행하였다. 불연속면 분석에 활용된 평균 포인트 밀도는 반자동 해석에 적합한 1,000 points/m2 이상으로 하였다. Fig. 7은 예비 분할 후 색깔로 구분한 포인트 클라우드를 나타낸 것이다. 일부 데이터의 공백(gap)은 식생 처리 및 필터링으로 인하여 원래 촬영시 포함되지 못한 음영지역으로 인하여 발생된 것이다.
포인트 클라우드에서 포인트 클러스터를 추출하려면 모든 점에서 가상의 촬영 위치에 대하여 역방향으로 재투영해야 한다. 이는 자료의 처리과정에서 원시자료를 완벽하게 확보하지 않은 상태에서 병합과정을 통해 포인트 클라우드가 만들어졌기 때문이다.
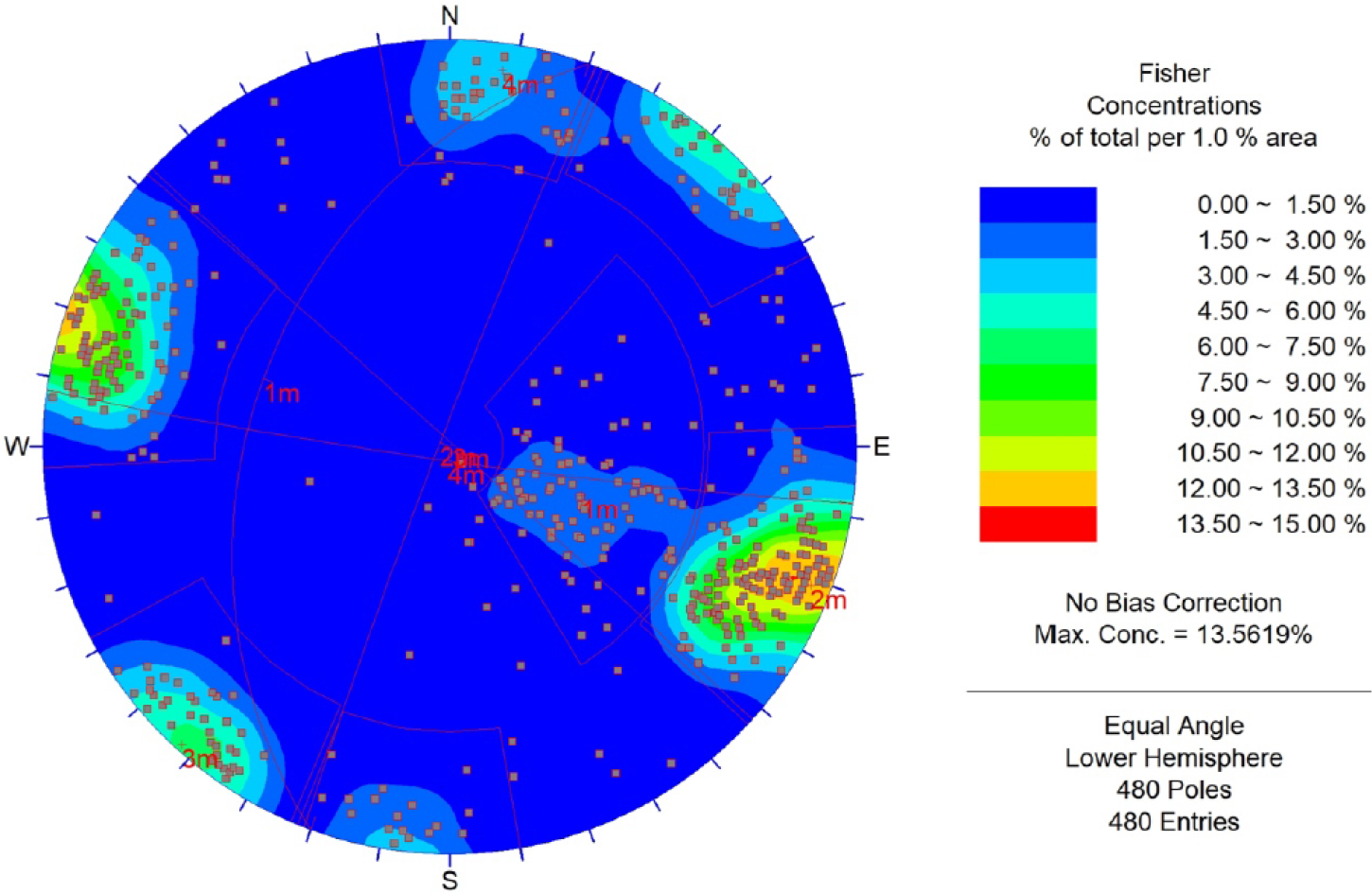
포인트 클러스터를 확인한 이후 클러스터의 병합 및 분류가 수행되었으며, 이를 토대로 극점에 대한 자료를 추출하였다. 추출된 극점 자료는 입체투영망에 도시하여 3차원 포인트 클라우드에 존재하는 주요 불연속면 군을 나타내었다. Fig. 8은 입체투영망에 표현된 불연속면 군을 나타낸 것이다. 그림에서 보는 바와 같이 입체투영망에 표시된 극점의 집중도를 고려하여 1.0% 면적에 대한 극점의 집중도를 색으로 표현하였다. 귀면암 암반사면의 경우 극점의 최대집중도는 13.56%로서 총 480개의 극점이 표시되었다.
귀면암 암반사면의 주요 불연속면 군에 대한 방향(orientation)과 경사방향(aspect)을 분석하여 암반사면의 경사방향도(aspect map)를 Fig. 9와 같이 도시하였다. 도시된 그림의 색상은 경사방향의 방위각을 나타낸 것이다. 그림에서 보는 바와 같이 귀면암 암반사면은 서북서(WNW)와 동남동(ESE)의 방향에 대한 경사방향이 우세하지만 북북동(NNE)-남남서(SSW) 및 북서(NW)-남동(SE)의 방향으로 경사방향도 명확하게 나타난다.
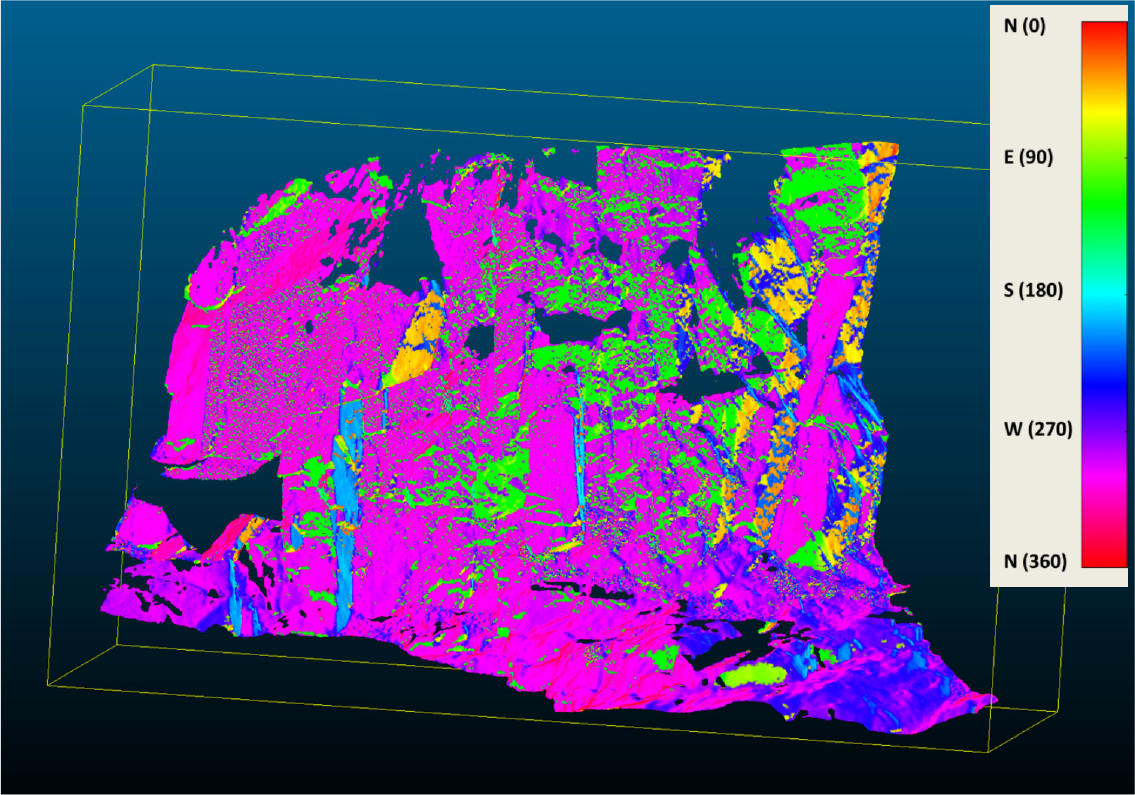
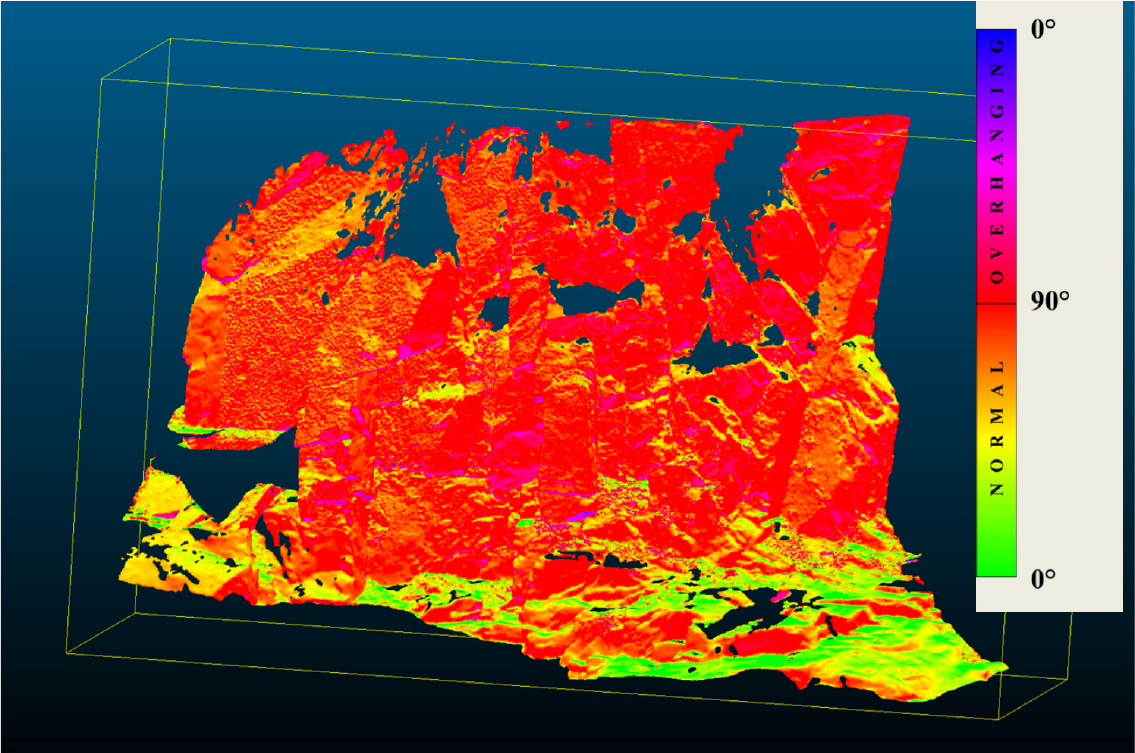
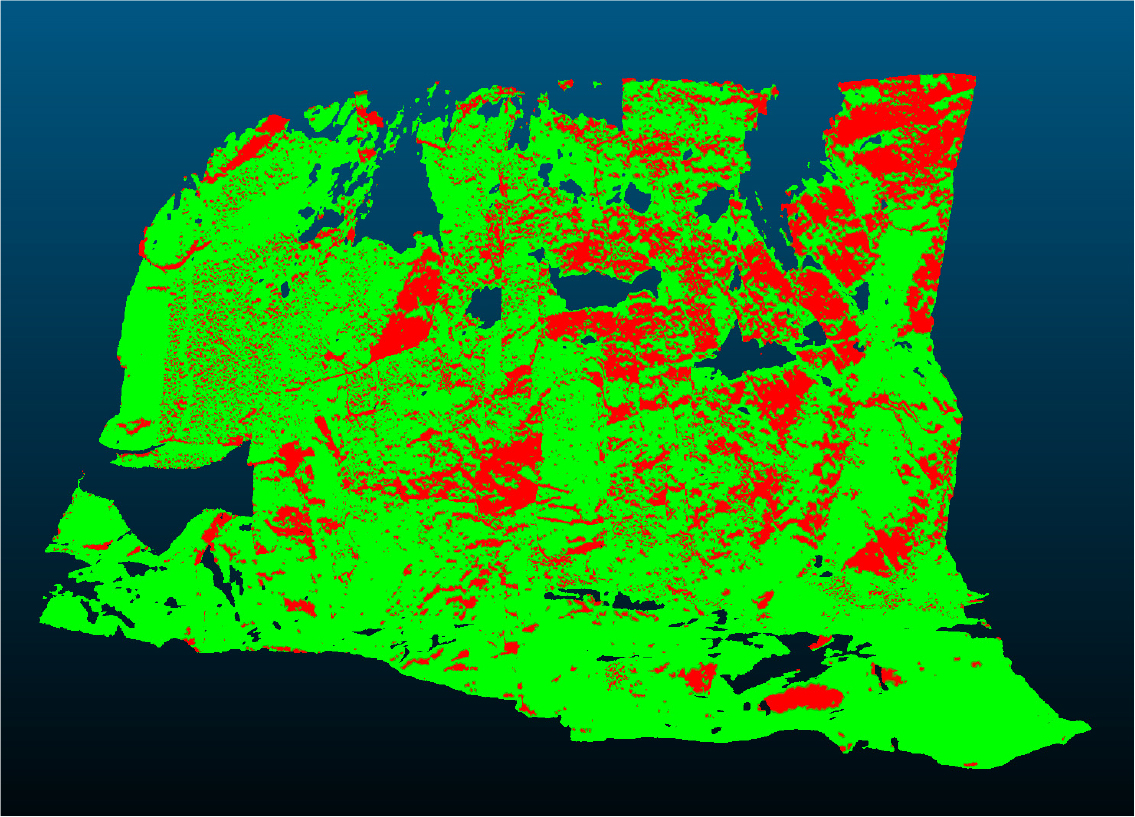
Fig. 10은 귀면암 암반사면의 주요 평면(평균 경사(dip)와 동일한 면)에 대한 사면경사를 나타낸 것이다. 그림에서 보는 바와 같이 90° 이상의 사면경사를 갖는 돌출형태(overhanging)의 암반블록이 상당히 많은 것으로 나타났다. 그러므로, Fig. 11은 귀면암 암반사면에서 돌출형태(overhanging)의 암반블록만을 추가적으로 나타낸 것이다. 그림에서 보는 바와 같이 돌출형태의 암반블록은 붉은색으로 나타내었다.
3차원 운동학적 해석 결과
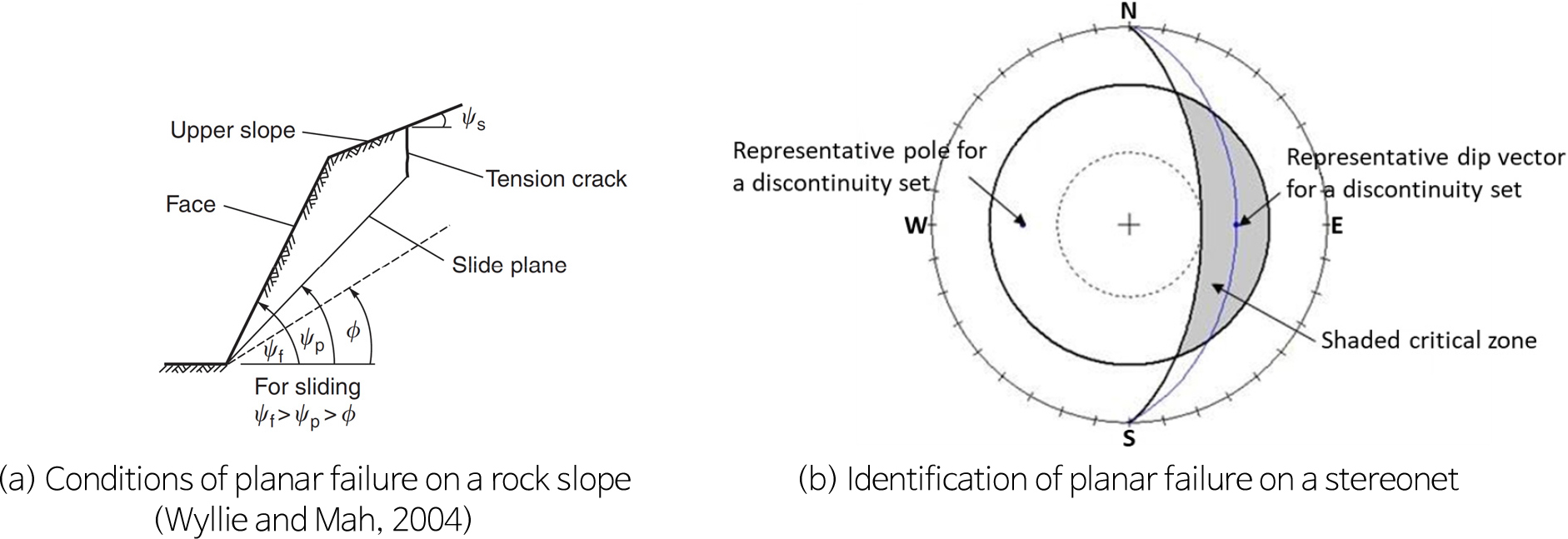
3차원 운동학적 분석을 통하여 주요 불연속면과 지형을 교차하면서 제시된 파괴기준을 만족하는 극점의 수를 자동으로 계산할 수 있다. 먼저 평면파괴(PF)와 쐐기파괴(WF)에 대한 기준은 Markland가 제시한 기준(Markland, 1972)을 적용하였다. Fig. 12는 Markland가 제시한 암반사면에서 평면파괴 조건 및 기준을 나타낸 것이다. 암반사면에서 평면파괴가 발생되는 경우는 으로, 는 사면의 경사, 는 활동면의 경사, 는 암반사면의 마찰각이다. 그림에서 보는 바와 같이 입체투영망의 회색영역에 극점이 존재하는 경우 평면파괴가 일어날 가능성이 있다는 것을 의미한다.
불연속면의 극점을 자동적으로 분류하고 입체투영망에 투영하여 3차원 운동학적 해석을 수행하며 평면파괴(PF)에 대한 운동학적 지수는 식 (1)에 제시한 바와 같다. Fig. 13은 평면파괴에 대한 운동학적 지수()의 계산결과를 나타낸 것으로 색상에 따라 지수값을 구별하여 도시하였다. 그림에서 보는 바와 같이 귀면암 암반사면의 경우 평면파괴에 대한 운동학적 지수가 0~34.38%의 범위에 있는 것으로 나타났다.
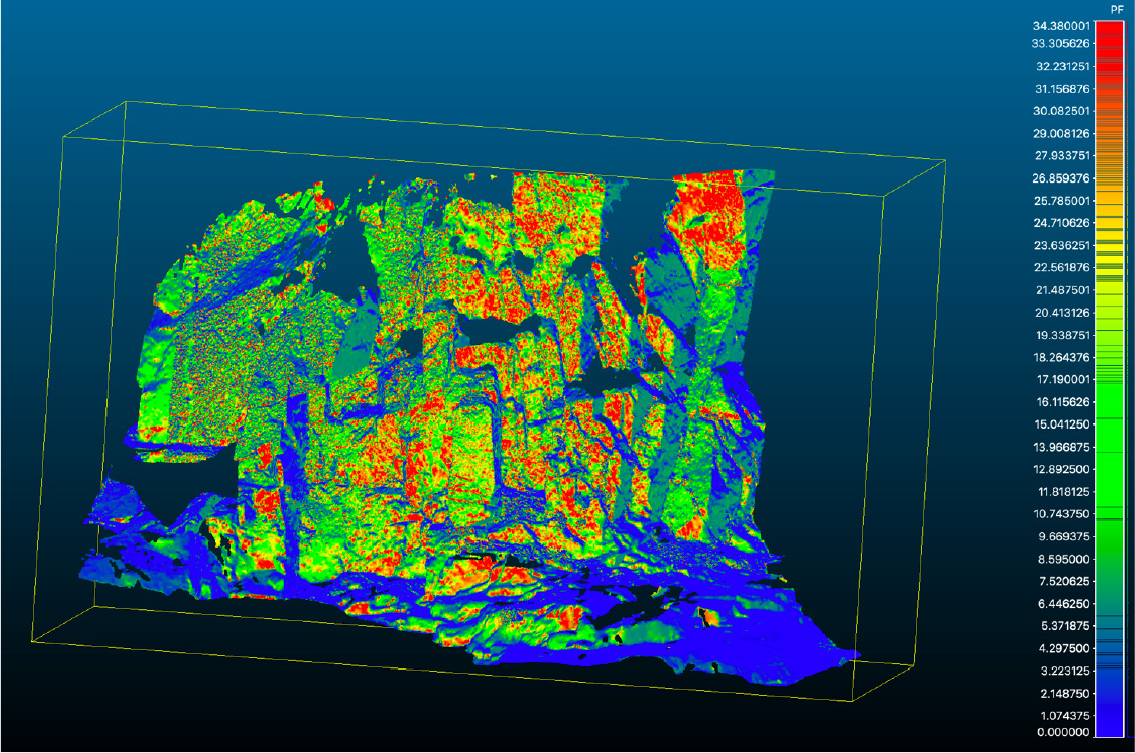
Fig. 14는 Markland가 제시한 암반사면에서 쐐기파괴 조건을 나타낸 것이다. 그림에서 보는 바와 같이 회색영역에 도시되는 극점들만 불안정한 것으로 판단할 수 있다. 왜냐하면 쐐기파괴를 유발하는 두 개의 평면에 의해 발생되는 교차선의 경사각()은 사면의 경사()보다 작아야 하기 때문이다().
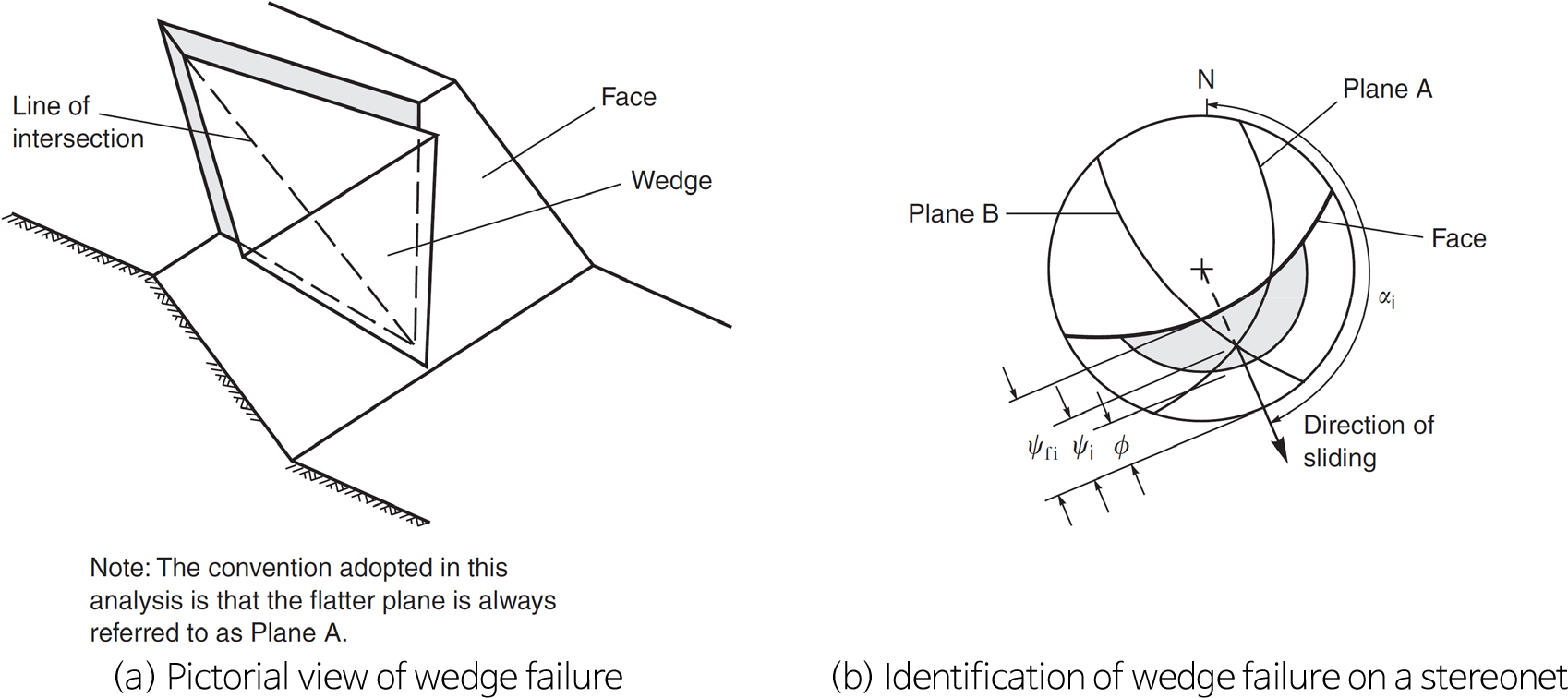
Fig. 15는 쐐기파괴에 대한 운동학적 지수()의 계산결과를 나타낸 것으로 색상에 따라 지수값을 구별하여 도시하였으며, 암반사면에서의 쐐기파괴(WF)에 대한 운동학적 지수는 식 (2)에 제시한 바와 같다. 그림에서 보는 바와 같이 귀면암 암반사면의 경우 쐐기파괴에 대한 운동학적 지수가 0~24.35%의 범위에 있는 것으로 나타났다.
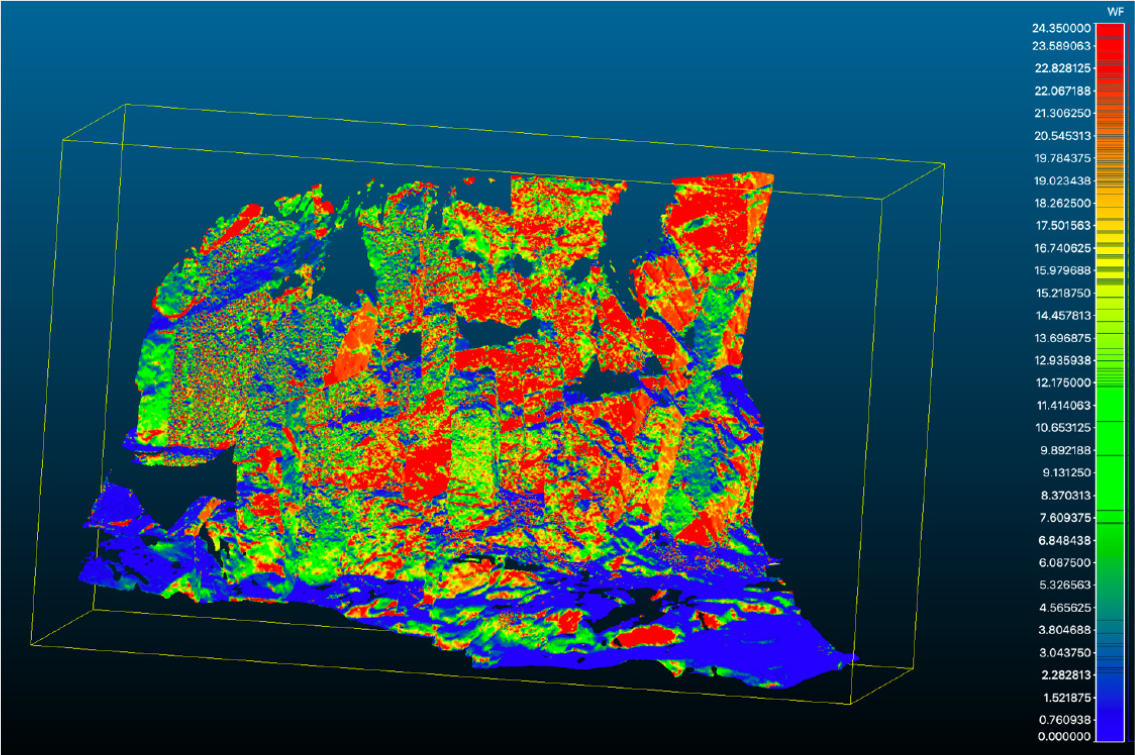
Fig. 16은 암반사면에서 블록전도(BT)의 발생양상과 발생조건을 나타낸 것이다. 암반사면에서 블록전도는 일반적으로 개별 암석기둥에 사면경사와 수평 및 수직인 불연속면이 교차하는 경우 발생된다. 이때 바닥면은 사면의 경사보다 평평해야 하며, 바닥면의 경사는 암반블록의 바닥면과 사면의 경사면 사이의 마찰각보다 작아야 한다. 그리고 불연속면의 경사방향은 경사면과 거의 평행해야(±20°) 한다.
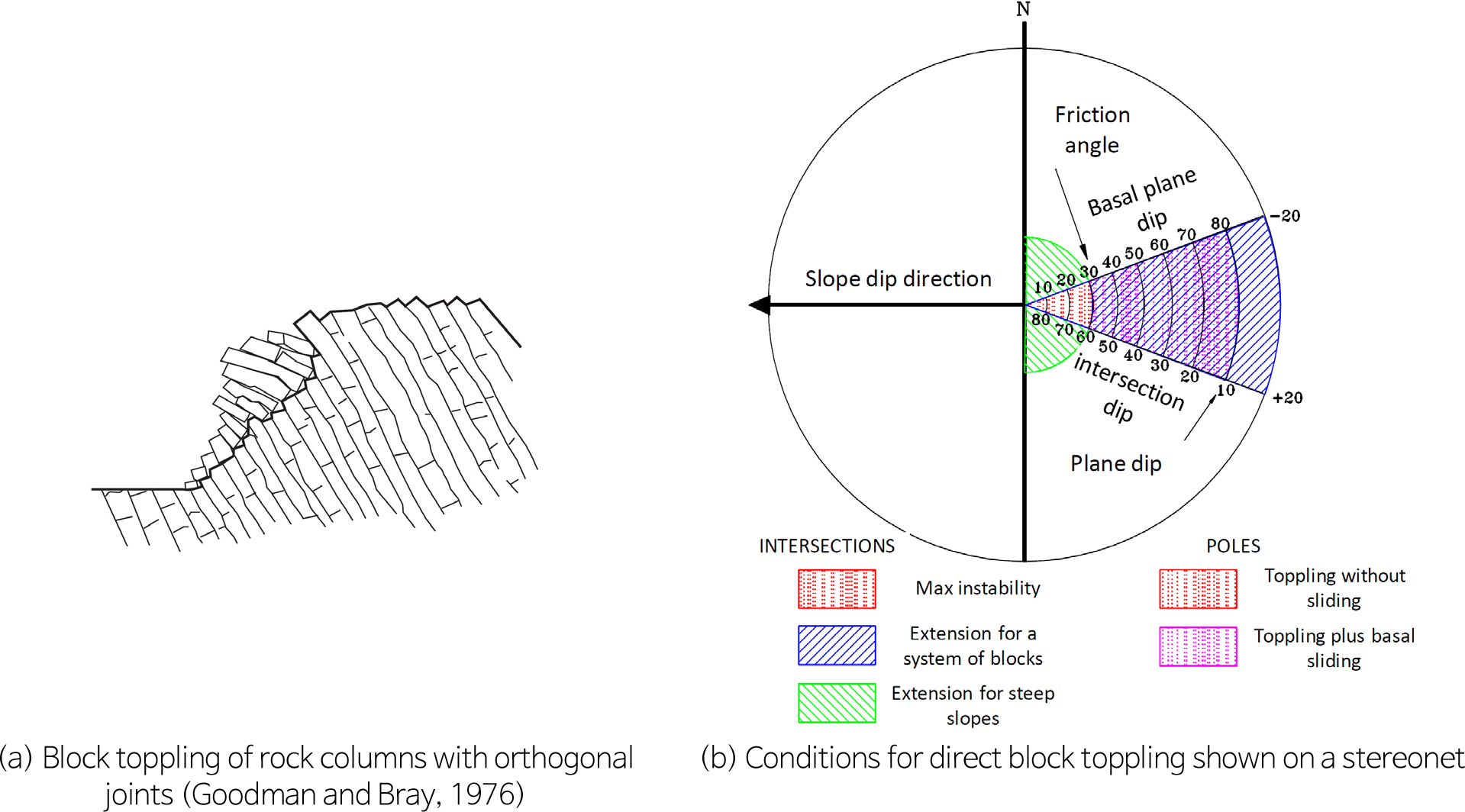
Fig. 17은 블록전도에 대한 운동학적 지수()의 계산결과를 나타낸 것으로 색상에 따라 지수값을 구별하여 도시하였으며, 암반사면에서의 블록전도에 대한 운동학적 지수는 식 (3)에 제시한 바와 같다. 그림에서 보는 바와 같이 블록전도에 대한 운동학적 지수는 0~0.41%로 상당히 낮은 값을 보임을 알 수 있다.
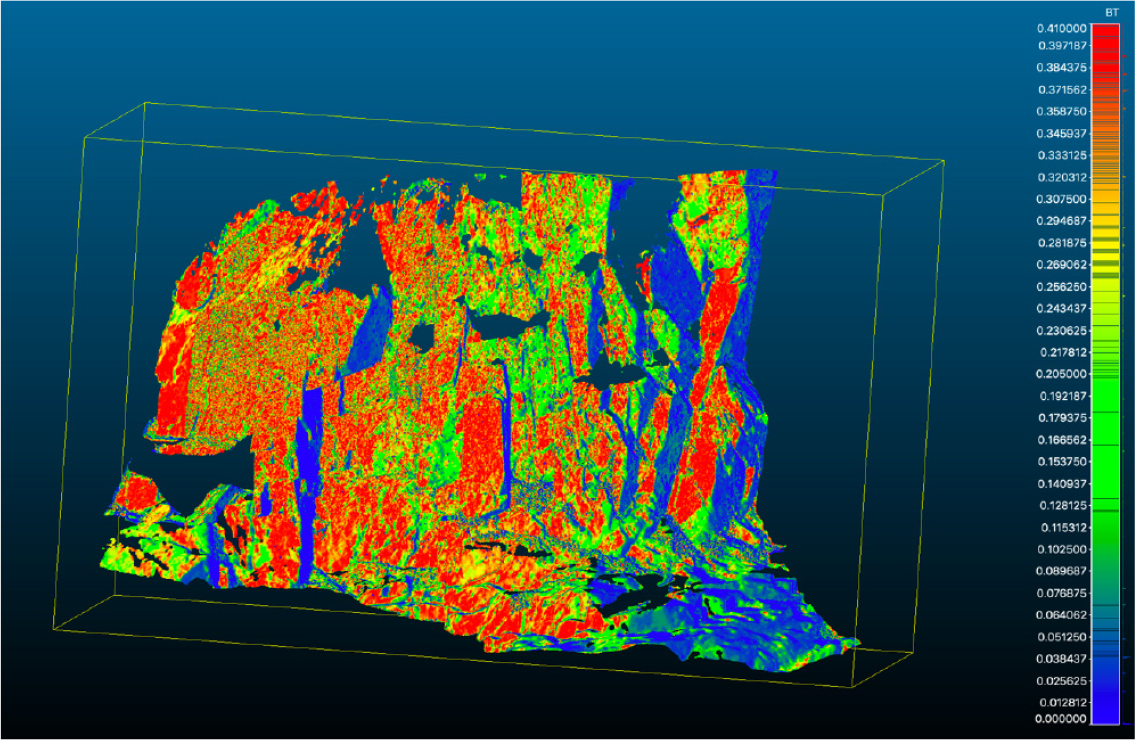
Fig. 18은 암반사면에서 휨전도(FT)의 발생양상과 발생조건을 나타낸 것이다. 암반사면에서 휨전도는 일반적으로 경사면에 평행한 슬래브 형태의 암석기둥이 형성되도록 불연속면의 경사방향이 경사면과 거의 평행(±10°)하여야 한다. 그리고 사면의 경사는 활동이 발생할 만큼 충분히 급하게 형성되어야 한다. 활동은 압축응력의 방향이 슬래브 면에서의 마찰각보다 큰 경우에만 발생된다. 그리고 절개면에서 주응력면의 방향이 절개면과 평행하고, 의 조건을 만족하면 휨전도가 발생된다. 이때 는 절개면의 경사이고 는 블록의 활동을 일으키는 면의 경사이며, 는 블록의 활동이 발생하는 면에서의 마찰각이다.
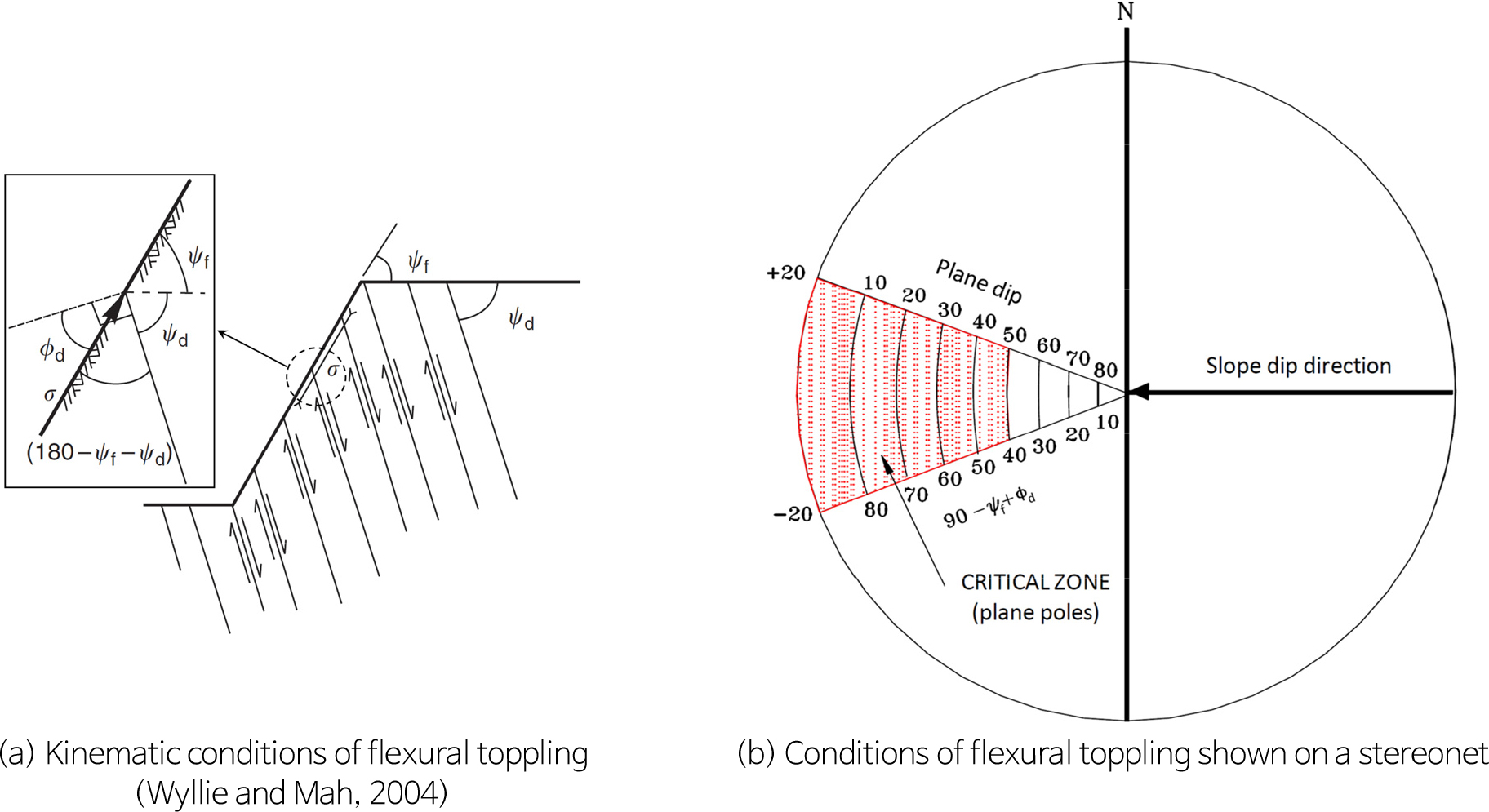
Fig. 19는 휨전도에 대한 운동학적 지수()의 계산결과를 나타낸 것으로 색상에 따라 지수값을 구별하여 도시하였으며, 암반사면에서의 휨전도에 대한 운동학적 지수는 식 (4)에 제시한 바와 같다. 그림에서 보는 바와 같이 휨전도에 대한 운동학적 지수는 0~38.84%의 범위에 있는 것으로 나타났다.
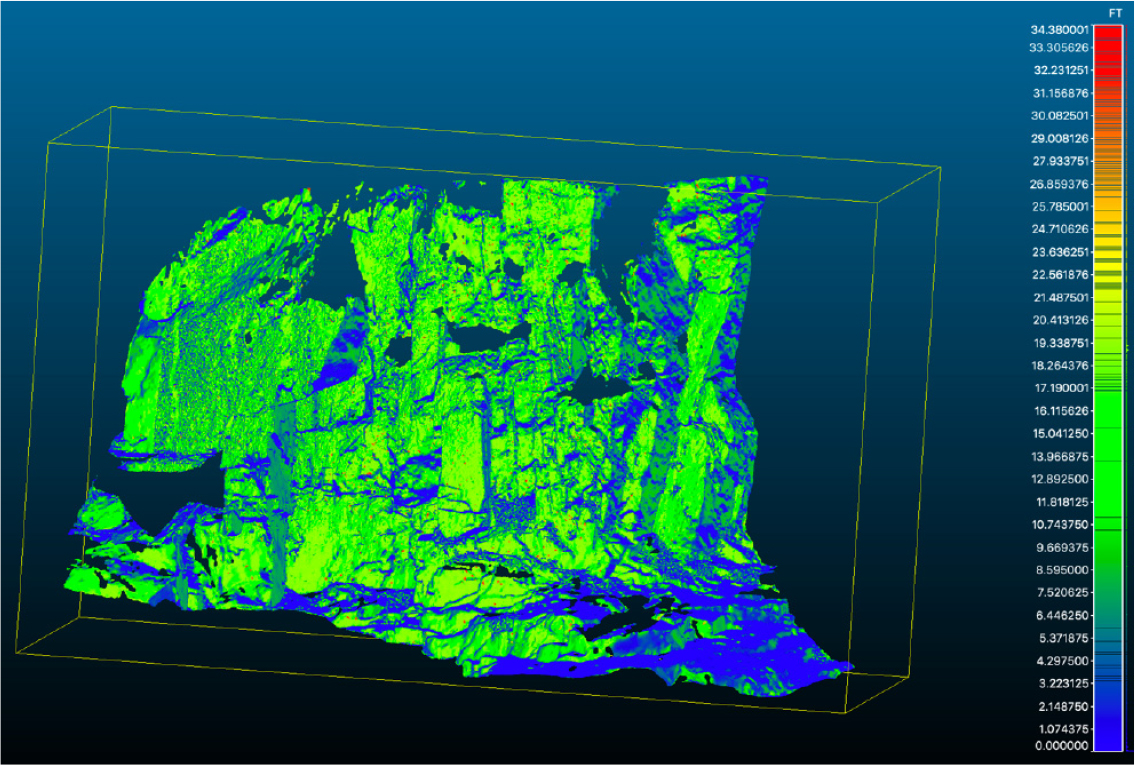
Fig. 20은 암반사면에서 자유낙석(FF)의 발생양상과 발생조건을 나타낸 것이다. 암반사면에서 자유낙석은 순수하게 인장파괴를 통해서 발생된다. 그림에서 보는 바와 같이 단일면의 인장균열에 의해 발생되는지 혹은 교차면의 인장균열에 의해 발생되는지에 따라 평면 자유낙석 혹은 쐐기 자유낙석으로 구분할 수 있다.
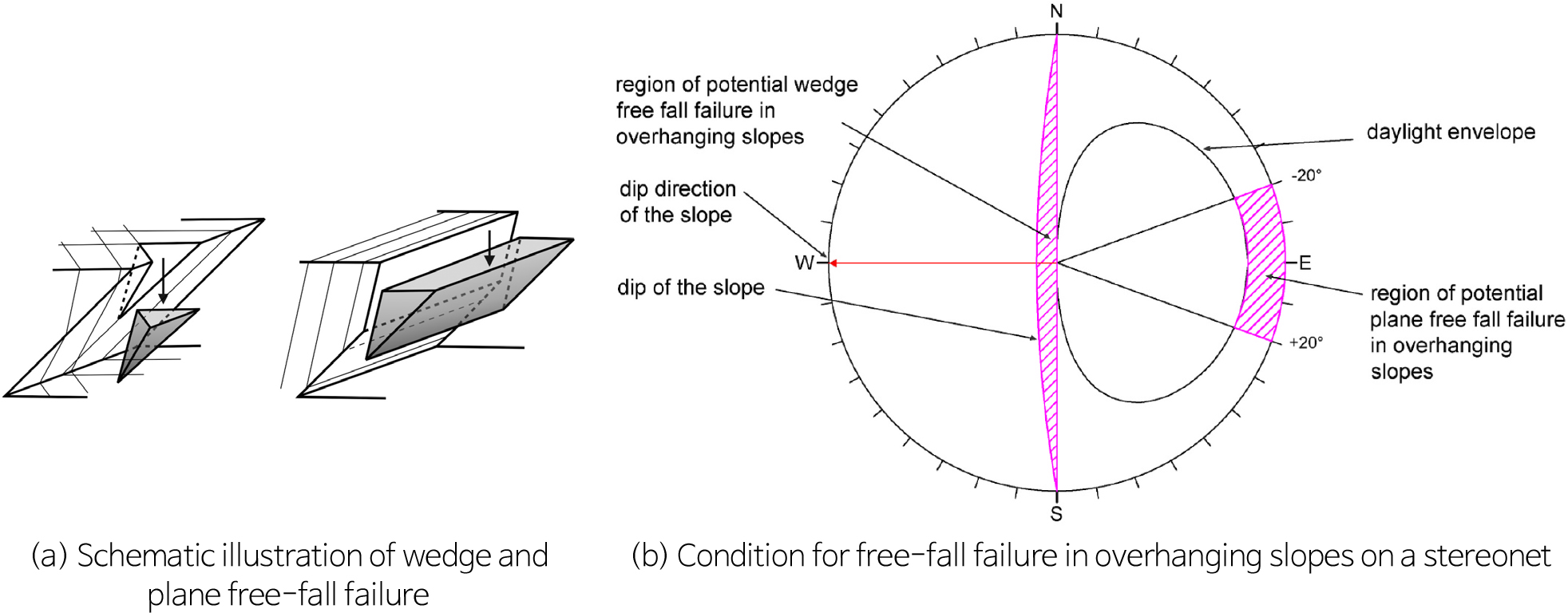
Fig. 21은 자유낙석에 대한 운동학적 지수()의 계산결과를 나타낸 것으로 색상에 따라 지수값을 구별하여 도시하였으며, 암반사면에서의 자유낙석에 대한 운동학적 지수는 식 (5)에 제시한 바와 같다. 그림에서 보는 바와 같이 돌출(overhang)형태의 블록의 밀도가 크지 않기 때문에 자유낙석은 많지 않을 것으로 판단된다. 그림에서 보는 바와 같이 자유낙석에 대한 운동학적 지수는 0~40.00%의 범위에 있는 것으로 나타났다.
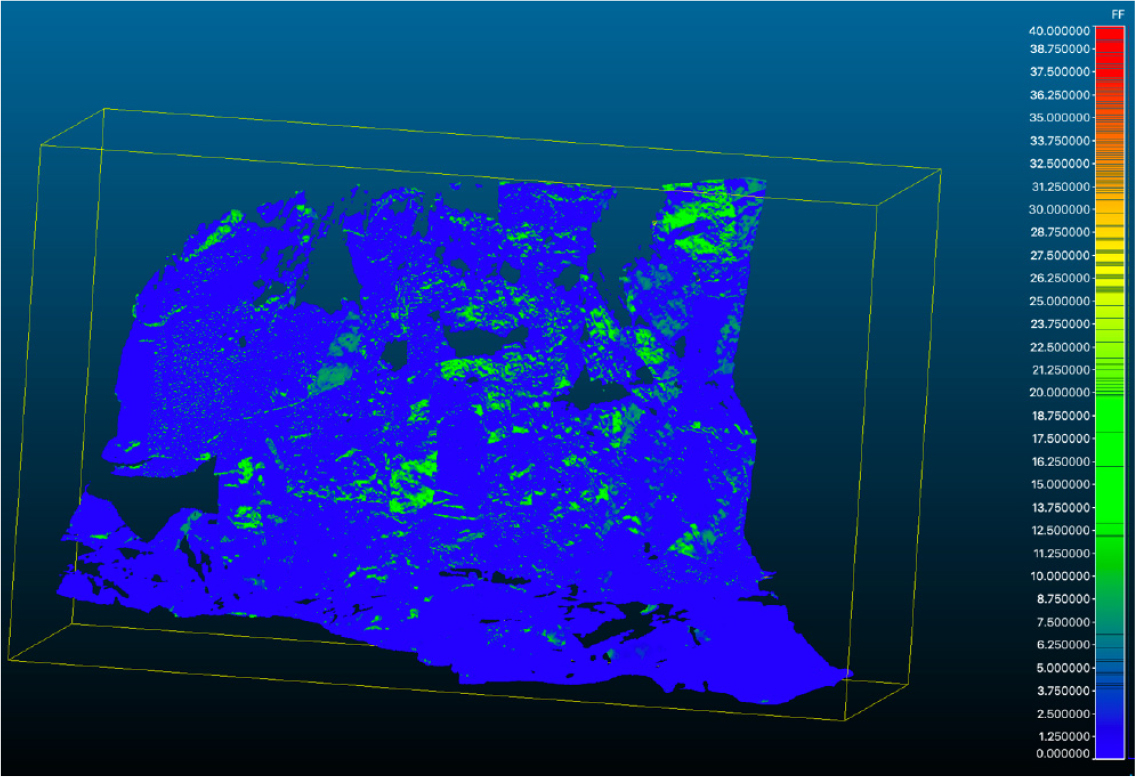
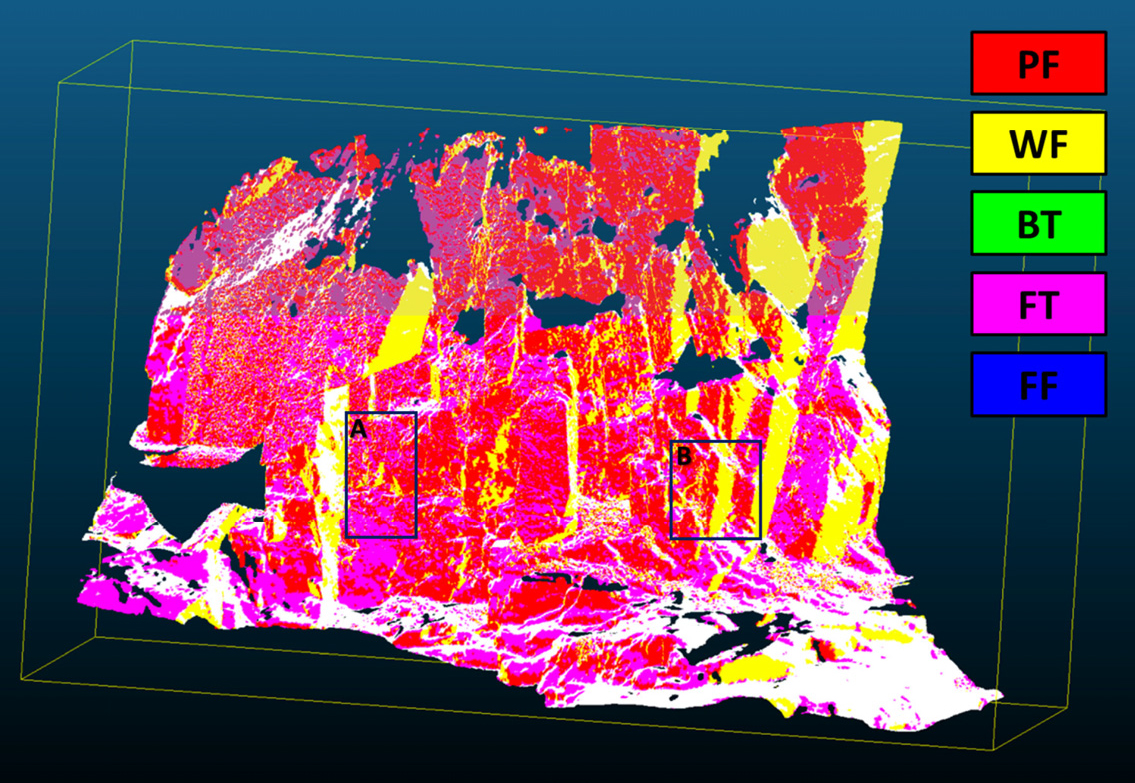
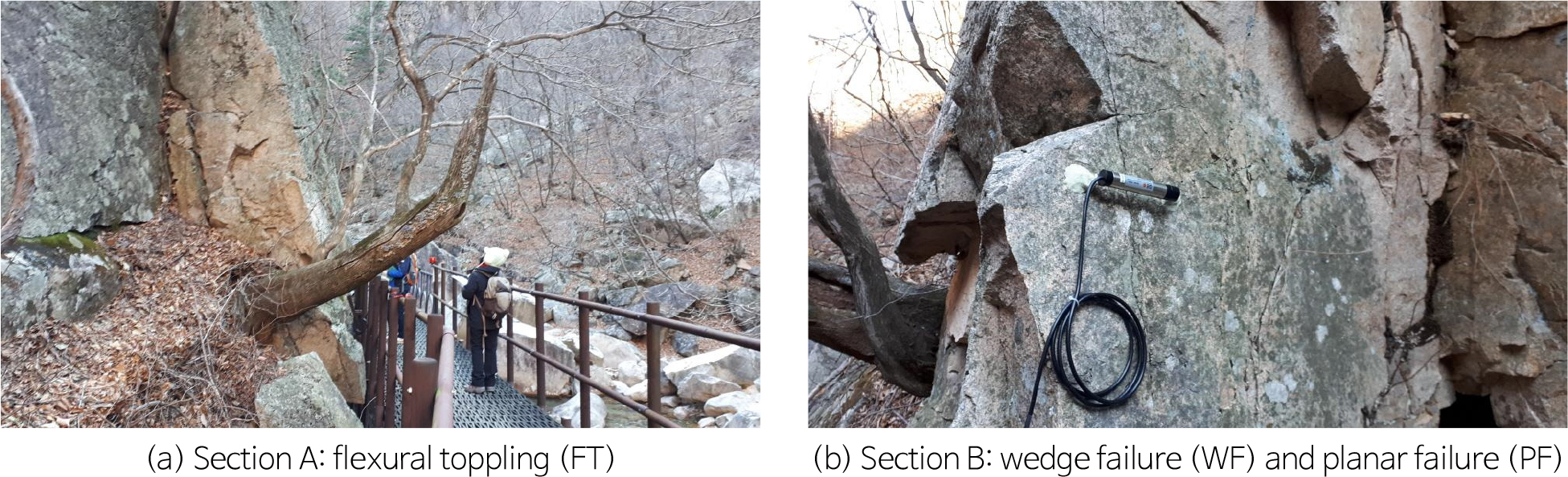
Fig. 22는 3차원 운동학적 지수를 이용하여 귀면암 암반사면에서 발생될 수 있는 다양한 파괴의 형태를 나타낸 것이다. 그림에서 보는 바와 같이 귀면암 암반사면의 경우 전체적으로 평면파괴(PF)와 휨전도(FT)가 넓게 분포되어 있으며, 쐐기파괴(WF)도 특정구간에서 발생될 가능성이 높은 것으로 나타났다. 블록전도(BT)의 경우 발생가능성의 매우 낮으며, 일부 자유낙석(FF)이 발생될 것으로 나타났다. Fig. 23은 Fig. 22에 도시한 A구간 및 B구간에 대한 현장사진을 나타낸 것이다. 그림에서 보는 바와 같이 A구간의 경우 휨전도 우수한 것으로 나타났으며, 현장사진에서도 휨전도가 발생될 가능성이 있는 암석블록을 확인할 수 있다. 그리고 B구간의 경우 쐐기파괴와 평면파괴가 우수한 것으로 나타났으며, 현장사진에서도 쐐기파괴가 기 발생되었거나 발생될 가능성이 있는 암석블록을 볼 수 있다.
결 론
본 연구에서는 지상 LiDAR 자료에 대한 3차원 반자동 추출기법을 이용하여 설악산국립공원 천불동 계곡에서 위치한 귀면암 일대의 암반사면을 대상으로 안정성 평가를 수행하였다. 귀면암 일대를 대상으로 지상 LiDAR를 이용하여 암반 표면의 불연속면을 촬영하고 3차원 공간 포인트 클라우드(point clouds)로부터 사면안정성 평가를 위한 매개변수를 반자동으로 추출하였다. 추출한 매개변수 항목을 토대로 귀면암 일대 암반을 대상으로 DiAna3D 프로그램을 이용하여 3차원 운동학적 해석을 수행하였다. 이상의 결과를 정리하면 다음과 같다.
(1) 지상 LiDAR 자료에 대한 3차원 반자동 추출기법을 통하여 국제암반역학회(ISRM)에서 제시한 지질공학적 매개변수를 산정할 수 있으며, 포인트 클라우드로부터 불연속면 분석에 활용된 평균 포인트의 밀도는 1,000 points/m2이다.
(2) 귀면암 암반사면에 대한 불연속면 군에서 총 480개의 극점을 선정하였으며, 귀면암 암반사면의 경사방향은 서북서(WNW)와 동남동(ESE)의 방향이 우세하지만 북북동(NNE)-남남서(SSW) 및 북서(NW)-남동(SE)의 방향으로 명확하게 나타난다.
(3) 3차원 운동학적 해석을 위하여 주요 불연속면과 지형을 교차하면서 파괴기준을 만족하는 극점의 수를 자동으로 계산하여 평면파괴(PF), 쐐기파괴(WF), 휨전도(FT), 블록전도(BT), 자유낙석(FF)에 대한 운동학적 지수를 산정할 수 있다.
(4) 귀면암 암반사면에 대한 3차원 운동학적 지수를 산정한 결과 평면파괴(PF)는 0~34.38%, 쐐기파괴(WF)는 0~24.35%, 블록전도(BT)는 0~0.41%, 휨전도(FT)는 0~38.84%, 자유낙석(FF)은 0~40.00%의 범위에 있으므로, 블록전도(BT)를 제외한 다양한 파괴형태가 발생될 가능성이 높음을 알 수 있다.
(5) 귀면암 암반사면의 경우 전체적으로 평면파괴(PF)와 휨전도(FT)가 넓게 분포되어 있고, 쐐기파괴(WF)와 자유낙석(FF)이 특정구간에서 발생될 가능성이 높은 것으로 나타났으며, 이는 현장조사 결과에서도 확인할 수 있다.
(6) 귀면암 암반사면을 대상으로 지상 LiDAR 자료에 대한 3차원 반자동 추출기법을 이용하여 암반 표면의 불연속면을 선정하고, 3차원 운동학적 해석을 적용하여 다양한 파괴형태와 발생위치를 파악할 수 있다.
