

서 론
지하투과레이더(Ground Penetrating Radar)
지하투과레이더의 구성
지하투과레이더의 원리
지하투과레이더 신호의 형상
실험 구성
탐사 측선 설정
장비 구성
신호의 보정
필터링(filtering)
이득 함수(gain function)
타임 제로(time zero)
배경 제거(background removal)
디콘볼루션(deconvolution)
영상 이득(display gain)
이상구간의 검측
체적함수비의 급격한 변화 구간 검측
요약 및 결론
서 론
최근, 지반침하 및 지반함몰이 지속적으로 발생함에 따라 재산 및 인명피해가 잇따르고 있다. 특히 도심지에서의 지반침하 및 지반함몰은 수도관 손상으로 인한 공동의 발생 및 체적함수비 변화에 의하여 발생할 수 있으므로(Waltham et al., 2007), 이를 사전에 예방하기 위하여 공동의 생성 및 체적함수비의 급격한 변화가 발생한 지반 이상구간에 대한 조사는 필수적이다.
지반의 이상구간 조사 방법으로써, 표준관입시험(standard penetration test), 콘관입시험(cone penetration test)등 원위치 관입시험이 수행될 수 있다. 그러나 이들 시험방법은 대형 관입장비를 동반하므로 많은 시간과 비용이 소모되며 지하의 상하수도관, 전선 등이 파괴될 위험이 있으므로 도심지에서 수행하기에는 적합하지 않다. 또한, 지반의 이상구간은 임의의 위치에 존재할 수 있으므로, 원위치 관입시험에 비하여 적은 비용과 소요시간으로 넓은 구간에 대하여 수행될 수 있는 비파괴 시험법의 적용이 요구된다.
비파괴 시험법으로는 지하투과레이더 탐사, 전기비저항 탐사, 탄성파 탐사가 널리 이용되고 있다. 이들 탐사 방법들 중, 전기비저항 탐사, 탄성파 탐사는 대상 지반에 대하여 전극 또는 수진기의 설치를 선행하여야 하므로 비교적 긴 탐사시간과 넓은 공간을 필요로 한다. 지하투과레이더 탐사의 경우 포장층 제거가 선택적이며, 지반조사 수행시 넓은 면적을 차지하지 않는다. 또한, 간소화된 장비구성 및 측정체계로 인하여 비교적 단시간 내에 조사가 가능하다.
지하투과레이더는 지반의 유전율 또는 대상 매질의 유전율에서 차이가 큰 지하 매설물의 탐사시 적용되어 왔으며(Davis and Annan, 1989; Kim et al., 2000), 기반암 경계 부의 깊이 평가 및 카르스트 지형에서 공동 위치의 조사에 도 널리 이용되고 있다(Rodríguez et al., 2014). 지반에 대하여 지하투과레이더 탐사를 수행할 경우 전자기파의 잡음 및 지반에 의한 손실이 필연적으로 발생하게 되며, 이로 인하여 실제 지반과는 상이한 결과로 분석하는 오류를 범할 수 있다.
본 연구에서는 도심지 내 이상구간을 검측하기 위하여 지하투과레이더 신호의 정확성을 향상시키고자, 공동을 모사 한 모형지반에 대하여 지하투과레이더 탐사를 수행하고 신호처리 기법을 적용하여 신호를 보정하였다. 필터링 기법을 적용하여 설정된 대역폭을 통과한 신호만을 측정하였으며, 이득 함수, 타임제로, 배경 제거, 디콘볼루션, 그리고 영상화 이득 기법을 적용하고 각 기법의 적용에 따른 신호의 변화양상을 분석하였다. 이후, 신호의 도달 시간과 공동의 깊이를 이용하여 산정한 상대 유전율 값과 모형지반의 체적함 수비로 예측한 상대 유전율을 비교하였다. 본 연구에서 수행된 지하투과레이더 신호의 보정 과정을 통하여 신호의 정확도를 향상시킬 수 있으며, 도심지와 같이 매설물의 실제 깊이가 알려진 경우 보정된 신호를 통하여 공동이 발생한 구간뿐만 아니라 체적함수비가 급격하게 변화한 구간 또한 검측될 수 있음을 보여준다.
지하투과레이더(Ground Penetrating Radar)
지하투과레이더의 구성
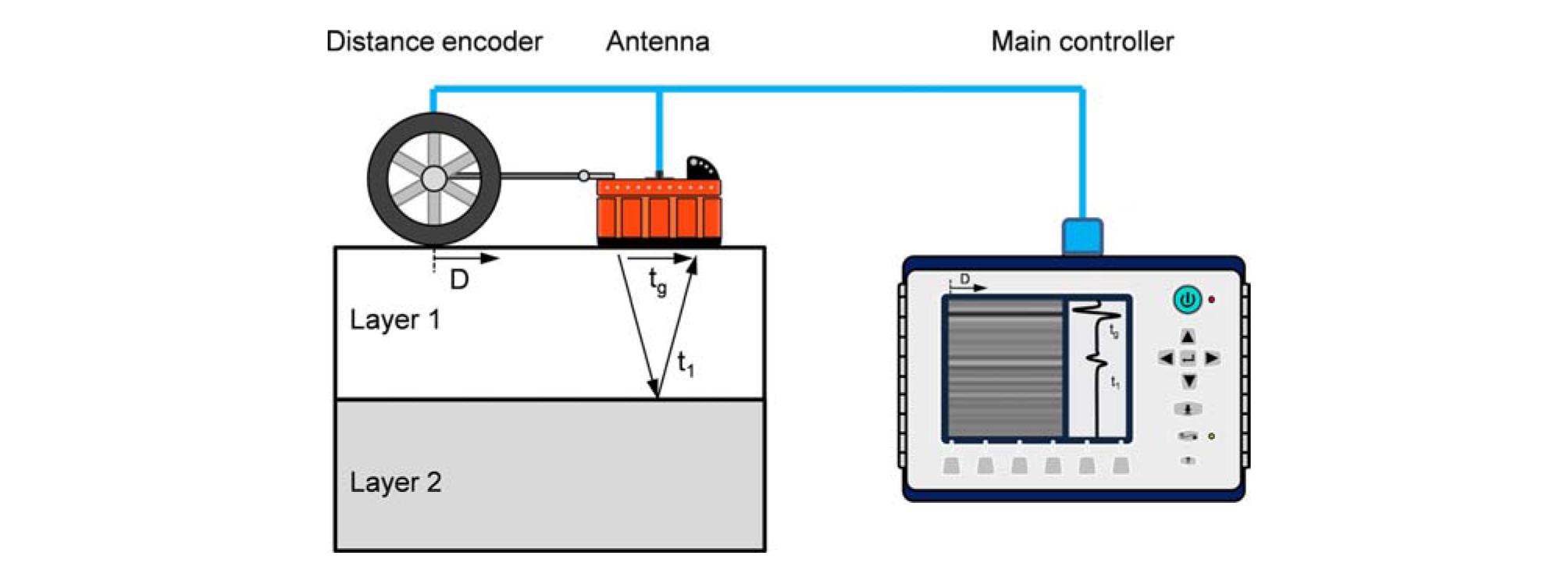
지하투과레이더 탐사의 측정체계는 Fig. 1과 같이 전자기 파 송·수신부 안테나, 측정 신호를 저장하고 시각적 정보로 나타내는 메인 컨트롤러로 구성되며, 정확한 탐사위치의 측정이 필요할 시 안테나의 거리 인코더를 부착하여 이용한 다. 안테나는 전자기파 송 ·수신부가 외부에 설치된 비차폐식 안테나(unshielded antenna)와 쌍극자가 차폐케이스 내부 에 설치된 차폐식 안테나(shielded antenna)로 구분하며, 탐사의 목적과 목표 깊이에 따라 작동주파수를 결정하여야 한다. 차폐케이스는 안테나 외벽 내에 존재하며 지반이 아닌 외부에서 반사된 신호를 최소화하기 위하여 사용된다. 차폐 케이스는 안테나의 링잉 현상(ringing effect)을 일으켜 잡음 을 발생시키기도 하지만, 탐사 경로 주변에 다수의 반사체가 존재하는 경우, 신호의 오차는 링잉 현상보다는 외부 반사체에 의한 신호가 지배적이다(Rodríguez et al., 2014). 이와 같은 이유로 다수의 반사체 및 잡음이 예상되는 도심 지 탐사의 경우, 차폐식 안테나가 주로 이용된다.
지하투과레이더의 원리
전자기파의 속도
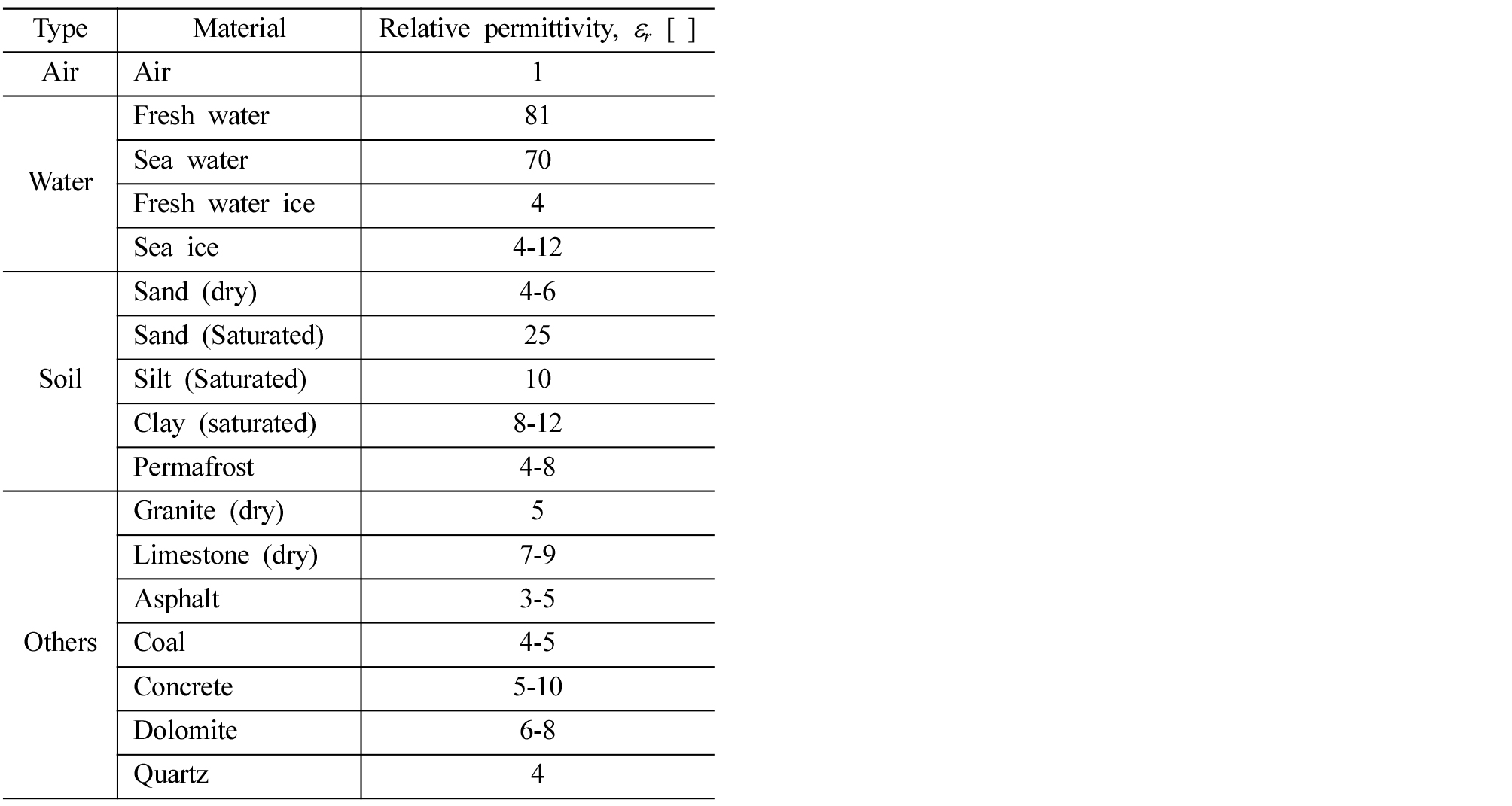
지반 내에서의 전파속도를 이용하여 측정된 도달 시간을 반사파의 깊이로 표현할 수 있다. 대표적인 매질의 상대 유전율은 Table 1과 같으며(ASTM D6432), 매질이 비강자성 일 경우 전파속도(v)는 식 (1)과 같이 표현된다.
 (1)
(1)
여기서, v는 매질에서의 전파속도, c는 진공상태에서의 전자기파의 전파속도(3.0 × 108 m/s), εr은 상대 유전율(relative permittivity)을 의미한다. 지반의 상대 유전율 값을 알고 있을 경우, 전자기파의 도달 시간을 이용하여 식 (2)와 같이 매설물의 깊이를 계산할 수 있다.
 (2)
(2)
여기서, t는 지하 매설물 및 이상구간으로부터 반사된 전자기파의 왕복 전파시간이므로 전파속도(v)와 절반의 도달시간(1/2t)을 곱하여 매설물의 깊이 S를 구할 수 있다. 예를 들어, Fig. 1의 tg, t1는 각각 지표면과 지층의 경계면에서 반사된 신호이며 Layer 1과 Layer 2 사이 경계면의 깊이는 첫 번째 층의 상대 유전율과 도달 시간 t1를 식 (2)에 대입하여 계산할 수 있다.
반사 및 투과계수>
매질이 비자성인 경우, 전기적 임피던스(z)는 식 (3)과 같이 매질의 상대 유전율(εr)의 제곱근과 반비례 관계를 갖는다(Daniels, 2004).
 (3)
(3)
Fig. 2와 같이 유전율이 서로 다른 두 매질의 경계면을 기준으로 전자기파가 전기적 임피던스 값이 z1인 매질에서, z2인 매질로 전파될 때, 반사계수(R)와 투과계수(T)는 식 (4), (5)와 같이 결정된다(Blitz and Simpson, 1995).
 (4)
(4)
 (5)
(5)
계산된 반사계수 및 투과계수의 절대값은 각각 입사파에 대한 반사파 및 투과파의 진폭의 비를 의미하며, 값의 부호는 전자기파의 위상을 의미한다. 투과파의 경우 항상 양의 부호를 가지므로 입사파와 동일한 위상을 보이며, 반사파의 경우 양의 부호를 가질 시 입사파와 동일한 위상을, 음의 부호를 가질 시 입사파와 반대의 위상을 보인다(San\- tamarina et al., 2001). 즉, 투과계수는 항상 양의 값을 가지게 되나, 반사계수는 전기적 임피던스 값의 대소관계에 따라양, 음의 값을 모두 가질 수 있다. 흙의 유전율은 흙입자, 공기, 물의 부피비율에 따라 결정되며 포화되지 않은 흙의 경우, 상대 밀도가 높을수록 공기에 비해 유전율이 높은 흙 입자의 부피비율이 증가하여 전체 유전율이 높아지며 전기적 임피던스는 작아지게 된다(Lichtenecker, 1926). 상대 밀도가 낮은 층에서 높은 층으로 전파될 시 유전율은(ε1 < ε2)이므로 전기적 임피던스는(z1 > z2)의 경우에 해당하며 반사계수는 음의 값을 가진다. 반면, 상대 밀도가 높은 층에 서 낮은 층으로 전파될 시 유전율은(ε1 > ε2)이므로 임피던스는(z1 < z2)의 경우에 해당하며 반사계수는 양의 값을 가진다.
쌍극자에서 방사된 전자기파는 Fig. 3과 같이 반사 및 투과계수에 의하여 반사파와 투과파의 진폭의 비율 및 위상이 결정된다. Fig. 3(a)는 지표 위 안테나에서 방사된 전자기파가 상대 밀도가 느슨한 구간에서 조밀한 구간으로, 이후 다시 더 조밀한 구간으로 전파될 때 반사파 위상의 모식도를 보여주며, Fig. 3(b)는 상대 밀도가 조밀한 구간에서 느슨한 구간으로, 이후 조밀한 구간으로 전파될 때 반사파의 위상의 모식도를 보여준다. Fig. 3 에 나타낸 도달 시간 tg의신 호는 안테나의 직접 결합(direct coupling)에 해당한다(GSSI, 2005). 직접 결합 신호는 쌍극자와 안테나 사이에서 반사된 전자기파이므로 위상이 180o 바뀌게 되며 방사된 전자기파와 반대의 위상(reversed polarity)을 보인다(Hong et al., 2015). 도달 시간 t1과 t2는 각각 첫 번째와 두 번째 경계면 에서 반사된 신호의 도달 시간을 의미한다. Fig. 3(a)와 Fig. 3(b)의 t1에서 측정된 두 신호를 비교할 경우 반사계수의 절대 값은 동일하지만 부호가 다른 경우에 해당한다. 이 에 따라 두 반사 신호의 진폭은 동일하지만, Fig. 3(a)의 t1은 방사된 전자기파의 반대의 위상(reversed polarity)을 보이는 반면, Fig. 3(b)의 t1은 동일한 위상(positive polarity)을 보인다(Hong et al., 2015). 즉 지반 내에 공동과 같이 유전율이 낮은 층이 존재할 경우, 공동에서의 반사파는 동일한 위상을 나타내나, 직접 결합 신호는 방사된 전자기파와 반대의 위상이므로 직접 결합 신호와 공동에서의 반사파 는 서로 반대의 위상을 나타낸다(Hong et al., 2015). Fig. 3(a)와 Fig. 3(b)의 t2에서 측정된 두 신호는 반사계수의 부호는 동일하지만 절대값이 다른 경우에 해당한다. 동일한 부호의 두 t2 중 반사계수의 절대값이 더 큰 Fig. 3(b)의 t2가 상대적으로 큰 진폭의 반사 신호를 보인다.
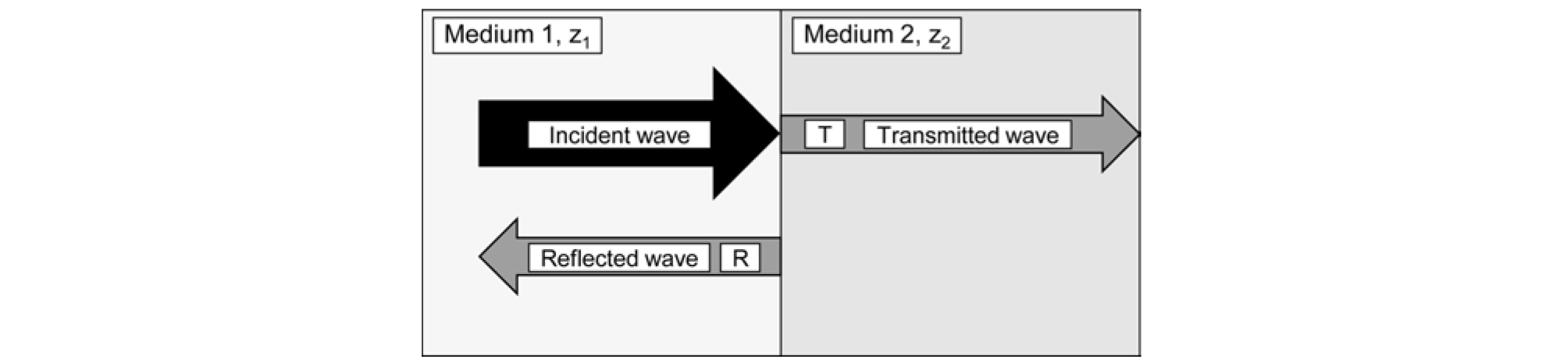
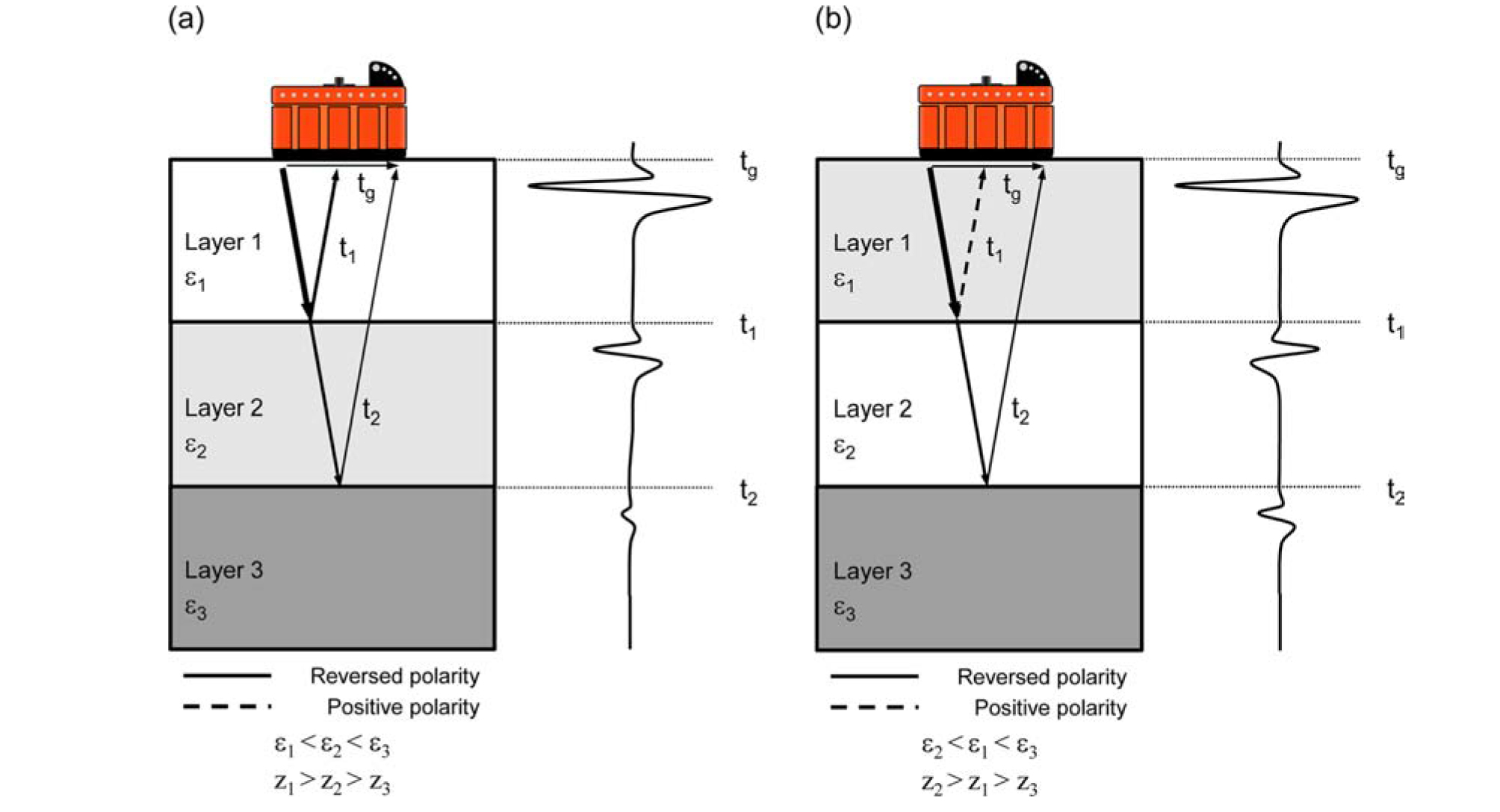
Fig. 3.
Layout of reflection and transmission of electromagnetic wave example model: (a) Loose to dense; (b) Dense to loose. εi denotes the relative permittivity of layer i. tg denotes the travel time of the signals reflected and directly transmitted through the surface ground. t1 and t2 denote the travel time of the signals reflected at the interfaces between 1st and 2nd layers, and between 2nd and 3rd layers, respectively
지하투과레이더 신호의 형상
지하투과레이더 탐사시 측정 신호의 도달 시간은 전자기파가 매설물의 실제 깊이가 아닌 안테나와 매설물의 표면까지의 거리를 왕복한 시간에 해당한다(GSSI, 2005). 일반적인 매설물의 경우 안테나가 매설물의 위치에 접근함에 따라 매설물과의 거리가 가까워지며, 안테나 수직 아래에 매설물이 존재하는 위치에서 매설물과 최단거리를 이룬다. 이후 안테나가 매설물과 멀어짐에 따라 거리 또한 멀어지므로 매설물은 포물선의 형상으로 측정된다. 반면 지표면 아래 다른 지층 및 지하수면이 존재할 경우, 안테나와 반사지점까지의 거리가 거의 변하지 않으므로 지하투과레이더 신호는 포물선이 아닌 직선의 형상으로 측정된다. 지하투과레이더 신호가 포물선의 형상으로 측정될 경우, 포물선의 꼭짓점 위치에서 측정된 신호는 안테나 수직 아래에 매설물이 존재하는 위치에서 측정된 신호에 해당한다. 즉 포물선의 꼭짓점 위치에서 측정한 반사파의 도달 시간과 지반의 상대 유전율을 이용하여 식 (2)와 같이 매설물의 매설 깊이를 산정할 수 있다.
실험 구성
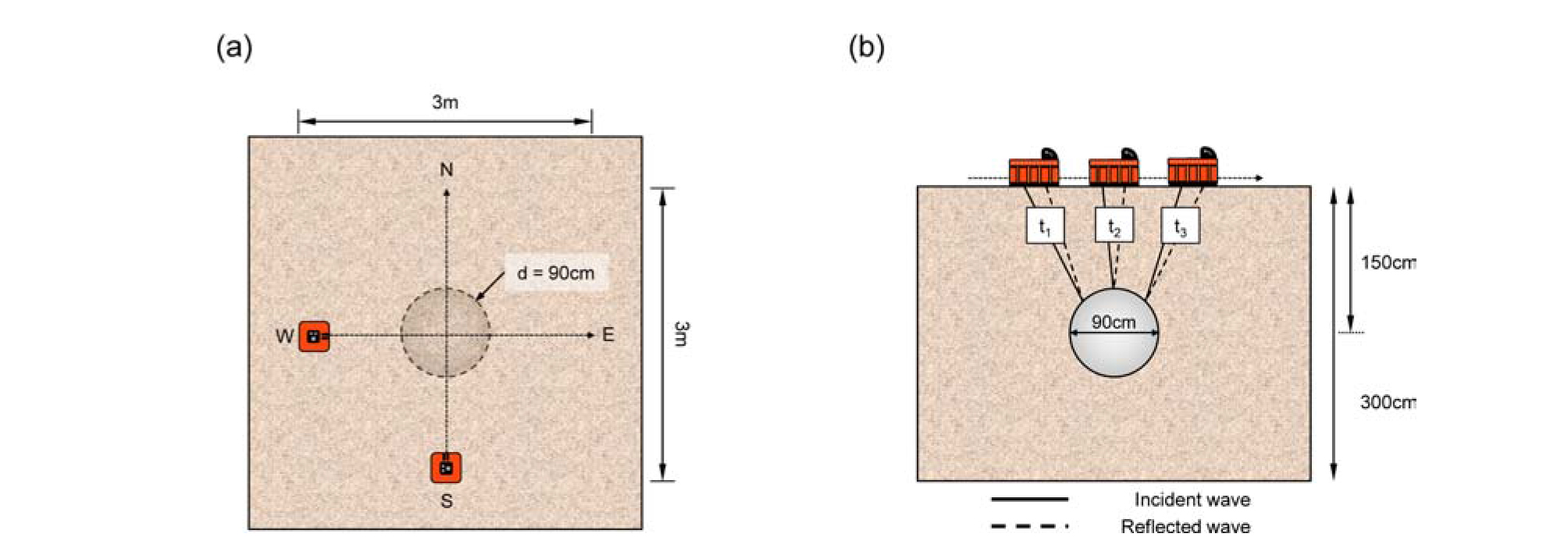
모형지반 조성
지반의 이상구간에서 반사된 전자기파를 획득하고, 신호 처리 및 영상화 기법을 적용하기 위하여 공동을 모사한 모형지반을 조성하였다. Fig. 4(a)와 같이 발포폴리스티렌의매 설지점을 중심으로 동-서(East-West), 남-북(South-North)방향으로 지하투과레이더 탐사 측선을 설정하였다. 모형지반의 총 깊이는 Fig. 4(b)와 같이 300 cm로 조성하였으며 지반의 중간 깊이에 해당하는 150 cm에 직경이 90 cm 구형의 발포폴리스티렌을 매설하였다. 발포폴리스티렌은 공기와 유사한 1.05의 상대 유전율 값을 가지므로(Schaubert et al., 1985)실제 공동과 흡사한 지하투과레이더 신호가 측정될 것으로 판단하였다. 모형지반은 화강풍화토(통일분류법에 의거하여 분류할 경우 SP에 해당)를 진동롤러를 이용하여 깊이 30 cm마다 진동 다짐 7회, 무진동 다짐 2회를 수행하여 조성되었다. 전체 위치에 대하여 동일한 횟수로 다짐으로써 위치에 따른 흙의 상대 밀도의 불균일성을 최소화 하였으므로, 모든 위치에서 깊이에 따른 모형지반의 상대 유전율 분포는 균일할 것으로 판단하였다. 또한, 투수계수가 상대적으로 큰 조립 토로 조성되었으므로 깊이에 따른 체적함수비의 불균일성은 과도하지 않을 것으로 판단하였다. 모형지반 조성 당시 터파기 과정 중 지하수는 발견되지 않았으며 이후 성토를 통하여 모형지반을 조성하였으므로 지하수의 영향은 없을 것으로 판단하였다. 지반 전체의 부피에 대한 물의 부피비율을 나타내는 체적함수비(θV)는 모형지반의 상대 유전율을 이용하여 예측할 수 있으며(Topp et al., 1980), 관계식의 역산을 통하여 체적함수비로부터 상대 유전율 값을 산정할 수 있다. 여기서 체적함수비는 식 (6),(7)와 같이 지반의 중량함수비(ω), 밀도(ρ)를 이용하여 산정할 수 있다.
 (6)
(6)
 (7)
(7)
여기서, Vw, V는 물과 지반 전체의 부피를 의미하고 Ww, Ws는 물과 흙 입자의 무게를 의미한다. 또한 ρw, ρdry는 물의 밀도와 흙의 건조밀도를 의미한다. 체적함수비는 모형지반의 중량함수비와 밀도를 통하여 산정할 수 있으므로 모형 지반에 대하여 함수비 시험, 들밀도 시험을 수행하였다. 시험을 수행한 결과, 모형지반의 중량함수비와 밀도는 각각 14.6%와 2.266 g/cm3으로 측정되었다. 식 (7)을 이용하여 산정한 건조밀도는 1.977 g/cm3이며, 중량함수비 14.6%와 건 조밀도 1.977 g/cm3를 식 (6)에 대입하여 얻은 체적함수비는 28.9%로 산정되었다.
탐사 측선 설정
조성한 모형지반에 대하여 Fig. 4(a)와 같이 매설된 구형의 발포폴리스티렌 중심을 기준으로 동, 서, 남, 북을 정하고 동-서, 남-북 두 방향으로 3 m의 측선을 설정하였다. 발포폴리스티렌의 최상부의 위치가 측선의 중앙에 위치하도록 설정하였으며, 공동 최상부에서 측정된 신호는 반사파의 도달시간이 가장 짧을 것으로 예상하였다. 또한 공동 최상부에서의 반사파 도달시간은 대상 지반의 깊이 105 cm 지점에서 반사되어 돌아오는 시간에 해당한다고 판단하였다.
장비 구성
공동의 직경이 안테나의 분해능보다 작을 경우 공동의 표면과 지반이 구분되지 않아 정확한 도달 시간을 측정할 수 없으므로 공동의 직경을 고려하여 안테나의 작동주파수를 선택하여야 한다(Pérez-Gracia et al., 2010). 얕은 지반에서 의 지하투과레이더의 수평 분해능은 최대 한 파장(1λ)에 해당하며(Pérez-Gracia et al., 2010), 안테나에서 방사된 전자기파의 파장은 식 (8)과 같이 계산할 수 있다.
 (8)
(8)
여기서, λ는 매질 내 전자기파의 파장, f는 안테나의 작동 주파수를 의미한다.
본 연구에서는 Geophysical Survey Systems Inc.(GSSI)사의 작동주파수 400 MHz 안테나를 이용하였다. 이용된 안테나는 차폐 케이스가 설치된 차폐식에 해당하며, 지반이 아닌 외부에서 반사된 신호와 잡음에 의한 영향이 최소화할 수 있을 것으로 판단하였다. 본 연구에 이용된 안테나 작동 주파수의 적합성을 평가하기 위하여 대상지반에서의 수평 분해능을 산정하고자 하였다. 모형지반은 모래(SP에 해당)로 조성되었으므로 상대 유전율은 Table 1와 같이 최소 4(건조한 경우), 최대 25(포화된 경우)의 범위 내에 존재할 것으로 판단되었다. 이에 따라 모형지반 내 파장은 식 (8)을 이용하여 최소 15cm(εr =25 인 경우), 최대 37.5 cm(εr = 4인 경우)인 것으로 산정되었다. 주파수 400 MHz 안테나에 대하여 산정된 모형지반 내 파장의 최대값은 발포폴리스티렌의 직경보다 작으므로 반사파를 효과적으로 획득할 수 있을 것이라 판단하였다.
신호의 보정
필터링(filtering)
도심지에서 지하투과레이더 탐사를 수행하는 경우 지반의 반사파를 포함하여 외부 요인에 의한 잡음까지도 측정될 수 있다. 필터링 기법은 측정 신호를 시간 영역이 아닌 주파수 영역으로 변환하여 안테나의 작동 주파수 대역을 제외한 나머지 성분을 제거하는 기법이므로 시간영역으로 획득된 잡음을 효율적으로 제거할 수 있다(Jol, 2008). 안테나에서 방사되는 전자기파의 주파수 성분은 작동 주파수 근처 대역에 밀집되어 있다(Rial et al., 2009). 이에 따라 주파수 통과 대역은 작동 주파수의 1.5배에 해당하는 주파수 대역폭 간격을 작동 주파수를 중심으로 대칭 설정하는 것이 효율적이며(Jol, 2008)폭을 과도하게 좁게 설정할 시 신호의 손실이 발생할 수 있다. 본 연구에서 사용한 작동 주파수 400 MHz 안테나의 경우, 주파수 대역폭 간격이 600 MHz에해 당하는 100 MHz 이상, 700 MHz 이하보다 좁은 대역폭의 설정은 신호의 손실이 발생할 수 있다. 본 연구에서는 필터 링 기법으로 인한 신호의 손상을 방지하기 위하여 100 MHz 이상, 800 MHz 이하의 대역폭을 설정하고, 대역폭을 통과하는 신호만을 측정하였다. 동-서, 남-북 측선에 대하여 대 역통과 필터링(band pass filtering)기법을 적용하였으며 필터링을 거친 두 측선의 신호는 Fig. 5(a)및 Fig. 5(b)와 같이 나타났다.
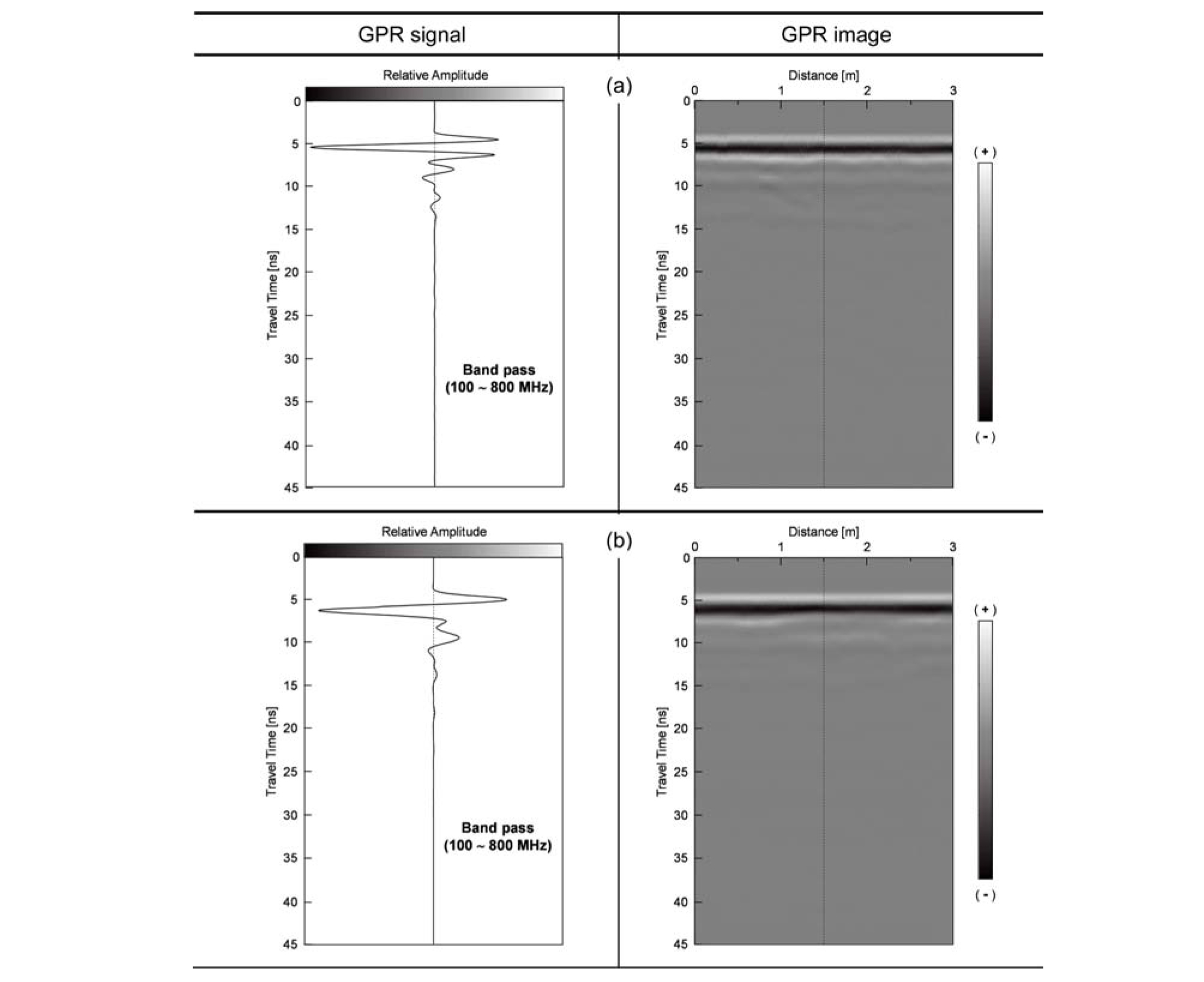
이득 함수(gain function)
이득 함수 기법은 도달 시간에 따라 서로 다른 비율로 증가 또는 감소시킴으로써, 진폭 측정값의 상한을 넘어(over range)신호가 손상되거나, 진폭이 작게 측정되어 잡음과 반사파의 신호의 구분이 어려워 분석이 어려워지는 경우를 방지하여 신호의 비교를 용이하게 해준다(Jol, 2008; GSSI, 2012). 필터링 기법을 거친 동-서, 남-북 측선의 측정 신호 는 Fig. 5와 같이 도달 시간 6ns 부근에 나타난 직접 결합(direct coupling)신호만이 강하게 나타났으며, 발포폴리스티 렌에서 반사된 신호에 대한 구분이 불가하였다. 본 연구에 서는 두 측선의 측정 신호에 대하여 이득 함수 기법을 적용함으로써 모든 도달 시간에서의 진폭이 유사한 수준으로 나타나도록 조절하여 분석이 가능한 신호로 나타내고자 하였다.
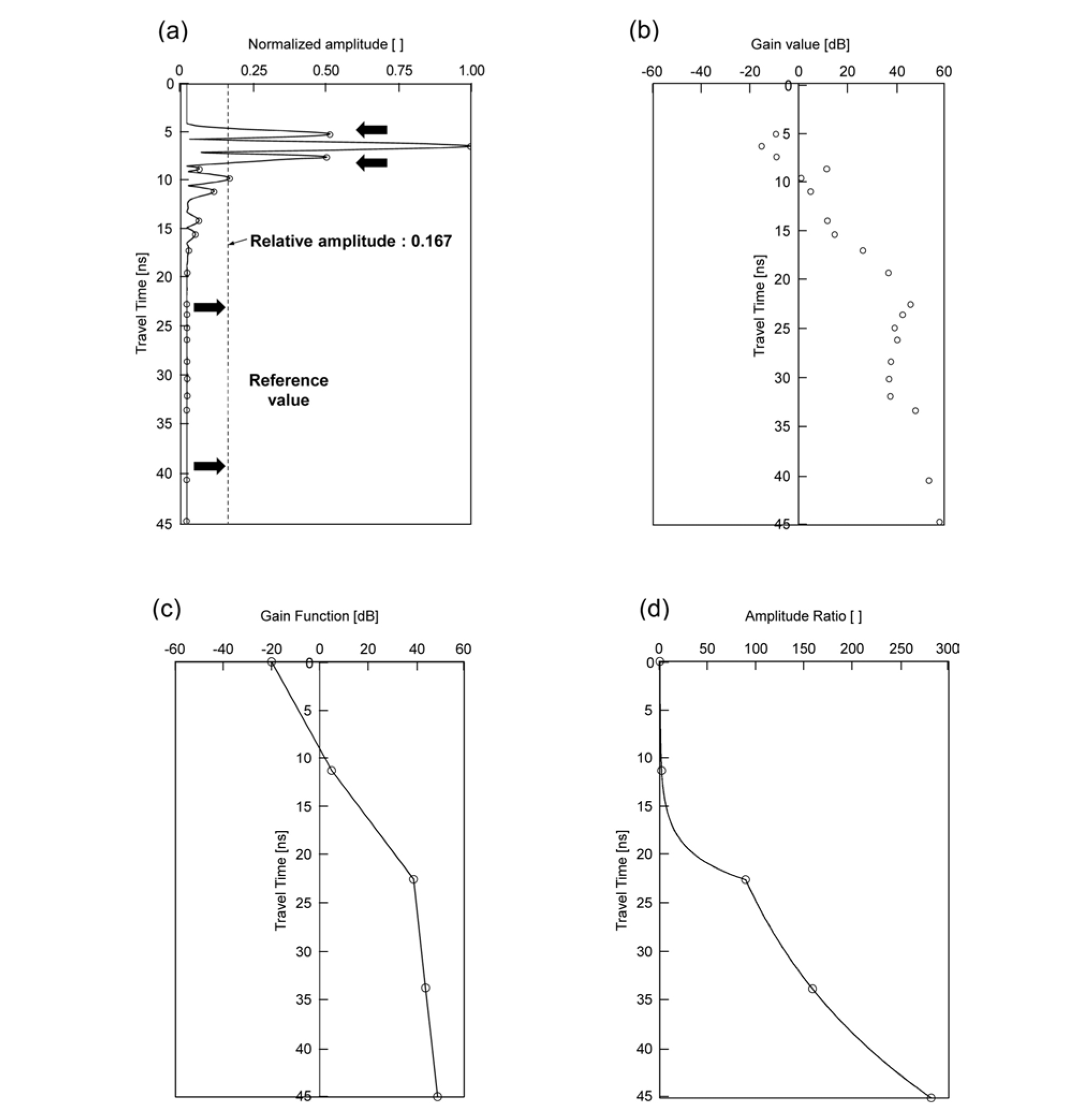
본 연구에서는 이득 함수 기법의 설정을 세 단계로 세분화하였으며, Fig. 6과 같이 동-서 측선을 예시로 들어 이득 함수의 설정과정을 나타내었다. 첫 번째 단계로써 기존 측정 신호에 나타난 직접 결합 신호의 최고 진폭을 기준으로 전체 도달 시간의 신호를 정규화한 이후 정규화된 진폭에 절대값 교정(absolute value rectification)을 적용한 결과, Fig. 6(a)의 실선과 같이 나타났다. 또한 절대값으로 나타낸 전체 진폭에 대하여, 최고점을 보이는 위치를 점으로 표시 하여 Fig. 6(a)에 나타내었다. 두 번째 단계는 진폭의 기준 값(reference value)설정에 해당하며, 전체 도달 시간의 진폭이 설정한 기준값과 유사한 진폭으로 측정되도록 조절하고자 하였다. 기준값은 고정 값이 아닌 측정 신호에 따라 다른 값으로 설정될 수 있다. 본 연구에서는 최고점이 나타나기 시작한 도달 시간 5ns와, 값이 급격하게 작아지기 시작하는 도달 시간 15 ns의 중간지점인 도달 시간 10 ns에서의 진폭을 기준점으로 설정함으로써 과도한 비율로 증가 또 는 감소되는 경우를 방지하고자 하였다. 도달 시간 10 ns에서의 정규화된 진폭은 약 0.167(=1/6)에 해당하였으며, 이를 기준값으로 설정하였다. 이후, 첫 번째 단계에서 나타낸 최고점 지점에서의 진폭과 기준값이 이루는 비율을 산정하였다. 산정된 비율은 이득값(gain value)이라고 하며, 기준값(0.167)과 유사한 진폭이 되기 위하여 기존 신호에 증감되어야 할 비율을 의미한다. 산정된 이득값은 Fig. 6(b)와 같이 데시벨(dB)단위로 나타내었다. 세 번째 단계는 이득값을 기반으로 한 이득 함수의 설정이다. 산정된 이득값은 최고점 지점에 한정된 비율이며, 전체 도달 시간에 대한 비율을 구하기 위하여 이득값의 추세선을 구하고자 하였다. 추세선은 도달 시간을 등분하는 마디(node)를 설정하고, 각 마디의 이득값을 연결하는 방법으로 구하였다. 마디가 많을수록 이득 값의 분포와 추세선이 유사해지는 반면 분석의 효율성이 떨어질 수 있으므로 본 연구에서는 마디를 5개로 설정하였다. 각 마디의 위치는 0, 11.25, 22.5, 33,75, 45 ns로 지정하였으며 각 마디에서의 이득값은 각각 -20, 5, 39, 44, 49 dB에 해당하였다. 각 마디의 이득값을 연결하여 Fig. 6(c)와 같은 이득 함수를 설정하였다. Fig. 6(c)에 나타낸 이득 함수는 9ns를 이전에는 음(-)의값, 9ns 이후에는 양(+)의값을 띄었으며, 이는 9ns를 이전의 진폭은 감소, 9ns 이후의 진폭은 증가함을 의미한다. 일반적으로 이득 함수는 데시벨 단위로 나타내나, 식 (9)를 역산하여 선형단위로도 나타낼 수 있다.
 (9)
(9)
여기서, Gain function(t)는 도달 시간 t에서의 이득 함수값, Abefore(t)는 이득 함수기법 적용전진폭, Aafter(t)는 이득 함수 기법 적용 후 진폭을 의미한다. 이득 함수를 선형 단위로 나타낸 모습은 Fig. 6(d)와 같다.
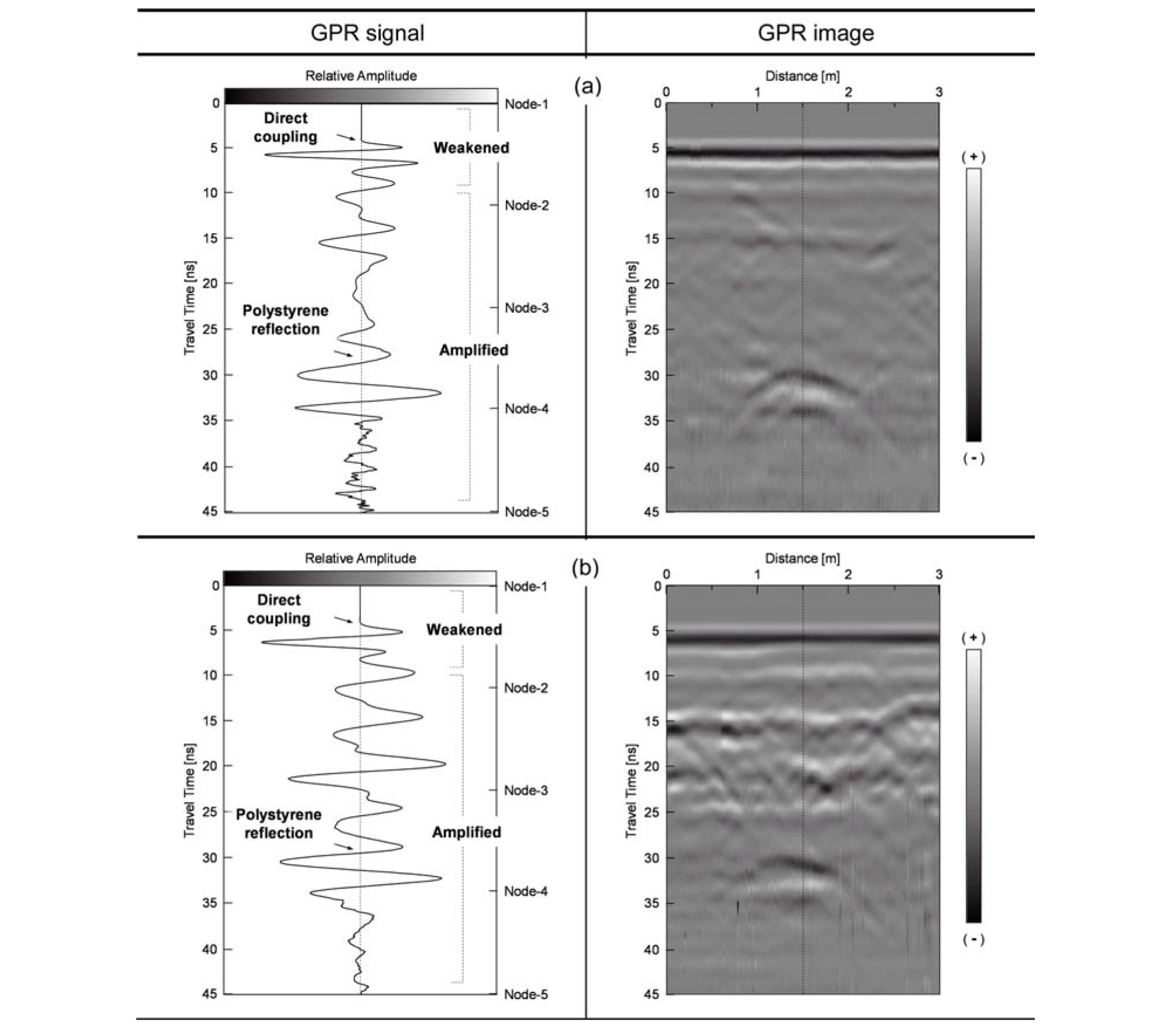
동-서, 남-북 측선에 대하여 이득 함수 기법을 적용한 모습은 Fig. 7(a)및 Fig. 7(b)와 같으며 Fig. 5(a)및 Fig. 5(b)에 비하여 과도한 진폭의 차이가 완화된 것으로 나타났다. Fig. 7(a)및 Fig. 7(b)모두 음(-)의 이득 함수값을 띄 는 도달 시간 9ns 이전의 신호에서는 진폭이 감소하여 적용전에 비하여 명암이 흐릿해졌으며, 9ns 이후에는 양(+)의 이득 함수 값으로 진폭이 증가하여 명암이 뚜렷해졌다. 이득 함수 적용을 통하여 Fig. 6(a)및 Fig. 6(b)와 같이 분석이 불가능했던 측정 신호는 가시화되어 신호의 형상과 위상에 대한 분석이 가능해졌으며, 33 ns 부근에 포물선 형상이 나타났다.
타임 제로(time zero)
지반에 대한 지하투과레이더 탐사 시, 안테나의 근거리장(near field)영역 내에 존재하는 유전체가 부하(dielectric loading)됨에 따라 전자기파가 송신부 쌍극자에 도달하는 이 동 시간만큼 전체 신호에 대하여 도달 시간이 지연되며 직접 결합 신호의 도달 이전까지는 신호의 진폭이 0을 나타 내는 구간이 존재한다(Yelf, 2004). 값이 0인 구간을 제거하고 도달 시간을 재배열하여야 매설물의 깊이에 대한 예측 시 오차를 줄일 수 있다(GSSI, 2012). 직접 결합 신호의 초기 도달 시간(first arrival time)을 기준으로 타임 제로 기법을 적용시켜 신호를 재배열할 수 있다(Viriyametanont et al., 2008).
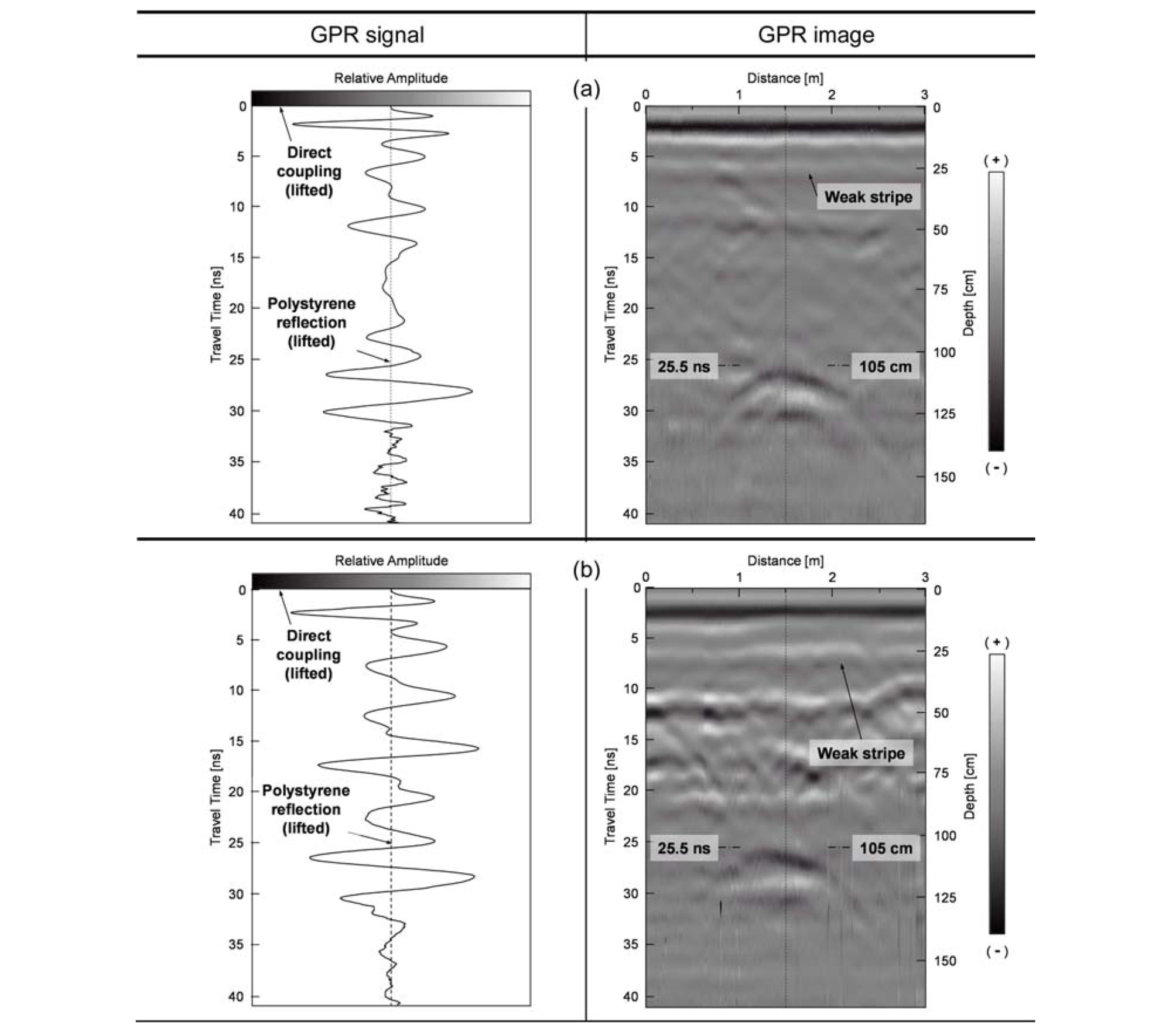
직접 결합 신호의 초기 도달 시간은 Fig. 7과 같이 4ns인 것으로 판단하였다. 4ns를 기준으로 측정 신호에 타임 제로 기법을 적용하였으며 타임 제로 기법 적용 전 29.5 ns에 위치해있었던 포물선 형상은 Fig. 8과 같이 25.5 ns 부근으로 이동되었다. 즉, 포물선 꼭짓점 위치에서 측정한 신호는 발포폴리스티렌의 최상부에서 반사된 신호이며 실제 도달 시간은 25.5 ns에 해당한다. 지표부터 공동의 표면까지 는 105 cm이므로 식 (2)를 이용하여 지반의 상대 유전율을 산정할 수 있으며, 연구 대상 지반의 상대 유전율은 13.3으로 산정되었다. 산정한 상대 유전율 값을 이용하여 모든 신 에 대하여 도달 시간을 반사 깊이로 변환할 수 있으며, 계산된 반사 깊이를 Fig. 8의 지하투과레이더 이미지의 우 측 종축에 나타내었다.
배경 제거(background removal)
배경 제거 기법은 전체 이동거리의 측정 신호에 대하여 도달시간에 따른 진폭의 평균을 구한 이후, 전체 이동거리 에서의 측정 신호에서 산정된 진폭의 평균을 제거하는 과정이다(Jol, 2008). 즉, 일정하게 측정된 신호일수록 진폭의 평균과 유사해져 제거되기 쉽다. 이와 같이 배경 제거 기법은 전체 이동거리에 걸쳐 일정하게 나타나는 링잉 현상과 같은 잡음을 제거하는 데 효율적이다.
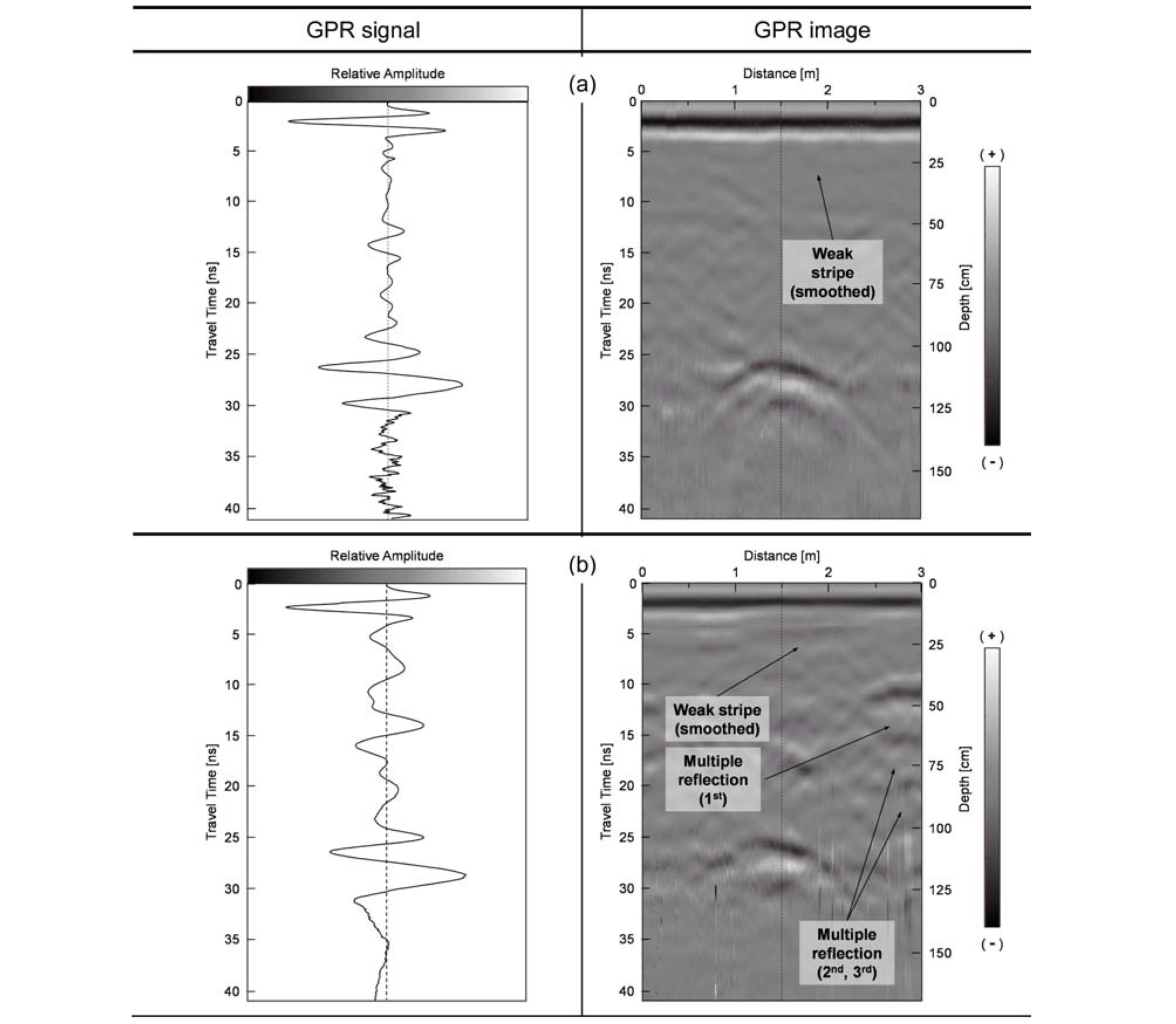
배경 제거 기법 적용 이전의 신호에서는 Fig. 8(a)및 Fig. 8(b)의 도달 시간 6ns에서 약한 진폭의 줄무늬가전 이동거리에 걸쳐 일정하게 나타났다. 이는 Fig. 8(a) 및 Fig. 8(b)의 0~4 ns에 걸쳐 나타난 직접 결합의 신호가 안테나 내부에서 반사되며 측정되는 링잉 현상에 의한 신호로 판단하였으며, 배경 제거 기법을 적용한 모습은 Fig. 9와 같다. 즉, Fig. 9(a)및 Fig. 9(b)에는 Fig. 8(a)및 Fig. 8(b)의 6 ns에 나타난 약한 줄무늬가 제거되었음을 알 수 있다. 반면, Fig. 9(a)및 Fig, 9(b)의 25.5 ns 부근의 포물선의 형상은 일정하게 나타나는 형상이 아니므로 배경 제거 기법을 통하여 제거되지 않고 신호가 유지되는 것으로 나타났다.
디콘볼루션(deconvolution)
지반 내에 주변과 전기적 임피던스 차이가 큰 매질이 존재할 시, 상부의 경계면과 매질 사이에서 전자기파의 반사가 반복되는 다중 반사 현상(multiple reflection)이 일어나며 일정한 도달 시간 간격으로 유사한 신호가 반복되어 나타난 다(GSSI, 2012). 다중반사 현상에 의한 신호는 지반의 실 제 반사 신호와 간섭되어 측정되므로 분석의 정확도를 저하 시킬 수 있다. 디콘볼루션 기법의 적용을 통하여 기존의 측정 신호에서 다중 반사 신호를 제거하고 다중 반사 현상의 영향이 감소된 지반의 실제 반사 신호를 획득할 수 있다. 본 연구에서는 다중 반사 신호는 주기가 일정하다고 가정하는 예측 디콘볼루션 기법(predictive deconvolution)을 적용하였다.
본 연구에서는 남-북 측선의 이동 거리 2.5~3 m의 구간에 서 Fig. 10(a)와 같이 유사한 형상의 반사파가 측정 되었으며, 다중 반사 신호일 가능성이 있는 것으로 판단하였다. 반사파들의 초기 도달 시간은 8, 13, 18, 23 ns인 것으로 측정되었다. 직접 결합 신호와 첫 번째 신호 간의 도달 시간 간격은 8ns이며, 이후의 도달 시간 간격은 모두 5ns로 동일하였다. 유사한 형상과 동일한 도달 시간 간격이라는 특징을 통하여 다중 반사 현상이 발생한 것으로 분석하였다. 즉, 지반 내 초기 도달 시간 8 ns, 13 ns 에 해당하는 깊이에 전기적 임피던스 차이가 큰 두 경계면이 존재하며, 전자기파가 두 경계면 사이에서 반사를 반복한 것으로 판단하였다. Fig. 10(a)의 초기 도달 시간 13 ns의 신호는 첫 번째 다중 반사 신호(1st multiple reflection)에 해당하며 18, 23 ns의 신호는 두, 세 번째 다중 반사 신호(2nd, 3rd multiple reflection)에 해당한다.
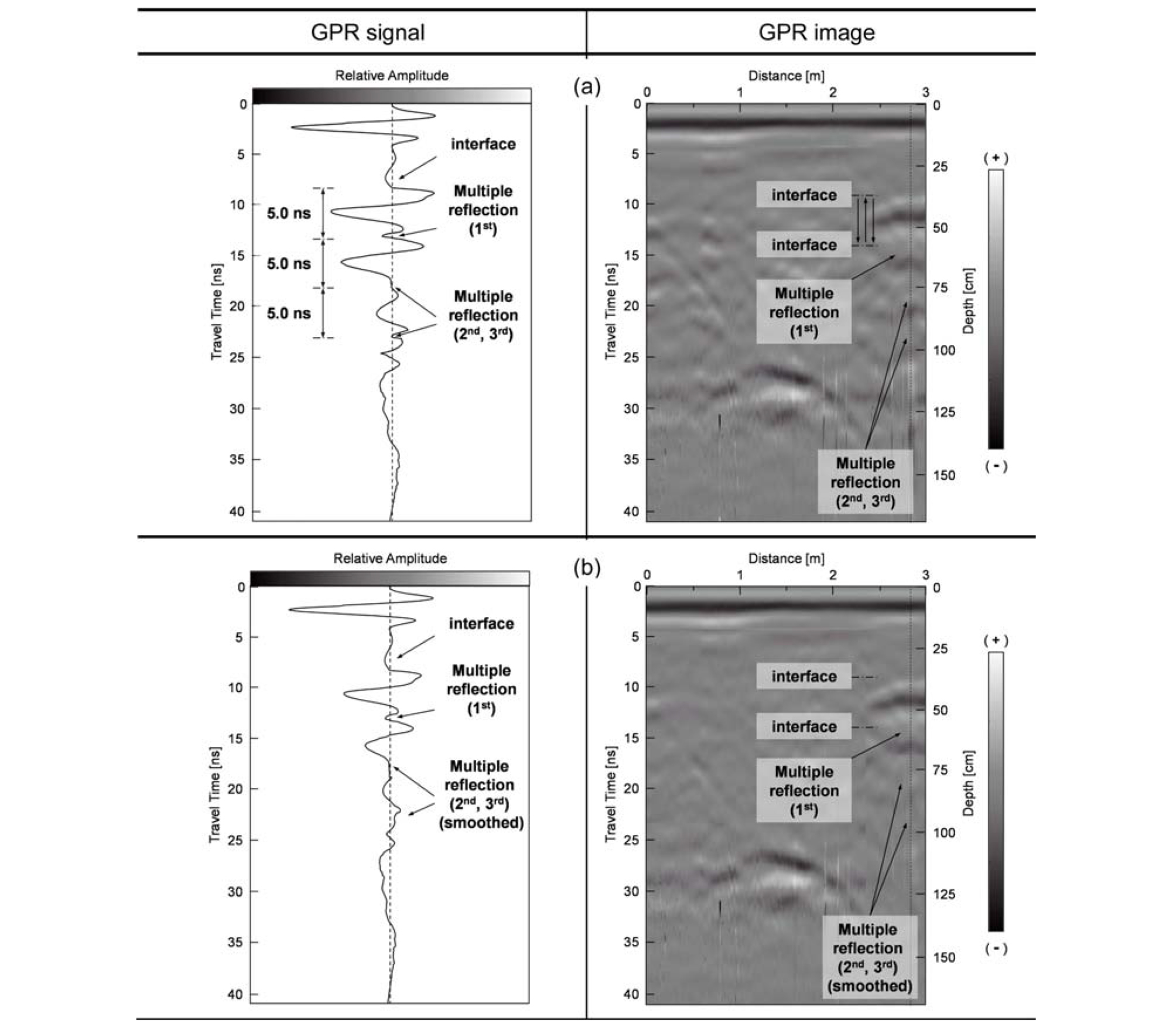
본 연구에서는 다중 반사 신호를 제거하기 위하여 남-북 측선의 이동 거리 2.5~3 m구간에 대하여 디콘볼루션 기법을 적용하고자 하였다. 전체 도달 시간 41 ns에 해당하는 지하투과레이더 측정 신호를 1,024개의 이산형 신호로 변환하였다. 즉, 도달 시간 1ns는 약 25개의 이산형 신호에 해 당한다. 다중 반사 신호의 전체 형상을 예측 디콘볼루션 기법에 반영하기 위해서는 디콘볼루션 연산자 길이 n을 다중 반사 신호의 파장(1λ)이상의 길이로 설정해야 하며, n이 커질수록 분석의 정확도가 향상되는 것으로 보고된 바 있다(GSSI, 2012). 본 연구에서는 다중 반사 신호의 파장이 Fig. 10(a)와 같이 약 3.3 ns인 것으로 판단하였으며, 파장의 3배인 10 ns에 해당하는 250을 디콘볼루션 연산자 길이 n의 값으로 설정하였다. 또한 다중 반사 신호간의 주기인 5ns에 해당하는 125를 디콘볼루션 연산자 예측거리 γ의 값으로 설정하였다. 예측 디콘볼루션 기법을 적용한 결과, 지반에 경계면에서 반사된 8, 13ns의 신호는 유지되었으나 2, 3차 다중 반사 신호에 해당하는 18, 23 ns 의 신호의 진폭은 감소되었다.
영상 이득(display gain)
영상 이득 기법은 이득 함수 기법과는 다르게 모든 도달 시간의 진폭에 대하여 동일한 이득을 적용하여 진폭의 강약을 강조함으로써, 영상이득 기법적용시측정신호의 진폭 및 위상에 대한 용이한 분석이 가능하다. 특히, 배경 제거 기법, 디콘볼루션 기법을 거친 신호는 진폭이 기법적 용전에 비하여 소폭 감소하게 되므로 영상 이득 기법의 적용을 통하여 감소한 진폭을 다시 증가시켜 보완하고자 하였다. 본 연구에서는 2dB의 영상 이득값을 사용하였으며, 식 (9)와 같이 전체 도달 시간의 진폭이 1.25배의 동일한 비율로 증가되었다. 영상 이득 기법 적용 후의 모습은 Fig. 11과 같으며 도달 시간 25.5 ns 부근의 포물선 형상이 비교적 선명해지는 것으로 나타났다.
이상구간의 검측
공동 발생 구간에서의 신호 분석
공동을 모사한 모형지반에 대하여 필터링 기법을 적용하기 위하여 대역폭을 설정하였으며 설정한 대역폭을 통과한 신호만을 측정하였다. 이후, 측정된 신호에 대하여 이득 함수, 타임 제로, 배경 제거, 디콘볼루션, 영상 이득 기법을 적용하였다. 안테나 이동거리, 반사 깊이, 공동의 직경, 매설 깊이 등의 축척을 통일한 지하투과레이더 이미지는 Fig. 12와 같다. 필터링 기법을 적용하여 잡음을 최소화하였으며, 이득 함수 기법을 통하여 전체 도달 시간에 따른 과도한 진폭의 차이를 완화하였다. 타임 제로 기법을 적용하여 전체 도달 시간을 재배열하였으며 배경 제거 기법을 통하여 링잉현상에 의한 줄무늬 형상을 제거하였다. 디콘볼루션 기법을 적용하여 다중 반사 현상에 의한 영향을 완화하였으며 영상 이득 기법을 통하여 배경 제거, 디콘볼루션 기법을 거치며 감소한 진폭을 보완하기 위하여 전체 도달 시간에 대 하여 동일한 비율로 증가시켰다. 신호처리 기법 적용 결과, 공동에서 반사된 신호의 형상과 위상이 가시화되었으며, 직 접 결합 신호와 반대 위상에 해당하는 흑-백-흑의 위상을 나타내었다. 측정된 위상은 Fig. 3(b)와 같이 상대밀도가 높 은 층에서 낮은 층으로 전파되는 경우와 부합한다. 이는 보정된 지하투과레이더 신호를 통하여 지반침하의 요인들 중 공동이 발생한 이상구간의 검측에 활용될 수 있으며 보정된 지하투과레이더 신호의 정확도가 향상되는 것을 나타낸다.
체적함수비의 급격한 변화 구간 검측 지하투과레이더 신호를 통한 체적함수비 산정의 가능여부를 평가하기 위하여, 보정된 지하투과레이더 신호의 도달 시간으로 산정한 상대 유전율과 연구 대상 지반의 체적함수비를 통하여 예측한 상대 유전율 값을 비교하였다. 깊이 105 cm에 존재하는 공동 최상부에서 반사된 신호의 도달시간은 동-서, 남-북 두 측선 모두 25.5 ns로 측정되었으며 식 (2)에 대입한 결과, 도달 시간으로 산정한 상대 유전율은 13.3으로 산정되었다. 체적함수비를 통한 상대 유전율의 예측은 Topp et al.(1980)에서 제시한 체적함수비와 상대 유전율 간 의 관계식인 식 (10)을 역산하여 산정하고자 하였다.
 (10)
(10)
여기서, θV는 체적함수비이며 εr은 상대 유전율을 의미한다. 모형지반의 모든 위치에 대하여 같은 횟수로 다짐을 수행하였으므로, 모든 위치에서 깊이에 따른 체적함수비는 균일한 분포를 보일 것으로 판단하였다. 또한 모형지반은 투수계수가 상대적으로 큰 조립토로 조성되었으므로 깊이에 따른 체적함수비의 과도한 차이는 없을 것으로 판단하였으며 지하수의 영향은 없는 것으로 고려되었다. 측정한 모형지반의 체적함수비 28.9%를 식 (10)에 대입한 결과, 모형지반의 상대 유전율은 15.9로 산정되었다. 지하투과레이더 측정 신호의 도달시간을 이용하여 산정한 상대 유전율 13.3과 체적함수비로 예측한 상대 유전율 15.9는 서로 유사한 값으로 판단된다. 본 연구에서는 지하투과레이더 신호에 대한 보정 과정을 통하여 신호의 도달 시간에 대한 정확도가 향상되었으며, 보정된 도달 시간과 매설물의 실제 깊이를 이용하여 지반의 상대 유전율에 대한 산정하였다. 도심지 내 지반은 매설물 이 넓은 영역에 걸쳐 분포해 있으며, 각 매설물의 실제 깊이가 알려져 있다는 특성이 있다. 도심지와 같이 매설물의 실제깊이를 알고 있을 경우, 보정된 도달 시간과 함께 실제 지반의 상대 유전율에 대한 산정이 가능할 것으로 판단된다. 도심지 내 지반에 대하여 산정된 상대 유전율을 통하여 넓은 영역에 걸친 체적함수비 또한 예측할 수 있으며 체적함수비가 급격히 변화하는 이상구간 또한 검측할 수 있을 것으로 판단된다.
요약 및 결론
본 연구에서는 보정 기법이 적용된 지하투과레이더 신호를 이용하여 위상 분석 및 상대 유전율 산정을 수행함으로 써 도심지 내 공동 및 체적함수비의 급격한 변화가 발생한 지반 이상구간을 검측하고자 하였다. 지반 이상 구간으로부터 반사된 전자기파를 획득하기 위하여 구형 발포폴리스티렌을 매설한 모형지반을 조성하였으며, 모형지반을 대상으로 지하투과레이더 탐사를 수행하였다. 필터링 기법을 거친 지하투과레이더 측정 신호에 대하여 이득 함수, 타임 제로, 배경 제거, 디콘볼루션, 영상 이득의 기법을 적용하였으며 신호의 변화양상을 분석하였다. 신호처리 결과 및 분석내용을 바탕으로 아래와 같은 결론을 도출하였다.
1. 일련의 신호처리 기법을 거친 공동에 대한 지하투과레이더 측정 신호는 신호의 형상이 가시화되었으며, 실제 공동이 발생한 지반에서의 전기적 임피던스 대소관계에 부합하는 위상을 띄었다. 이를 통하여 필터링, 이득 함수, 타임 제로, 배경제거, 디콘볼루션, 영상 이득으로 이루어진 보정 과정은 지하투과레이더 신호의 정확도를 향상시키는 것으로 판단되며, 보정된 지하투과레이더 신호를 통하여 공동이 발생한 이상구간을 검측 할 수 있을 것으로 판단된다.
2. 지하투과레이더 측정 신호의 도달 시간으로부터 도출된 상대 유전율과 모형지반의 체적함수비로부터 도출된상대 유전율을 비교하였으며 두 상대 유전율은 유사한 값을 나타내었다. 이를 통하여 도심지와 같이 매설물의 깊이가 알려져 있는 경우, 보정된 지하투과레이더 신호의 도달 시간과 매설물의 깊이를 이용하여 대상지반의 체적함수비를 계산할 수 있으며, 체적함수비가 급격하게 변하는 이상구간 또한 검측할 수 있을 것으로 판단된다.
